Liên hệ quảng cáo
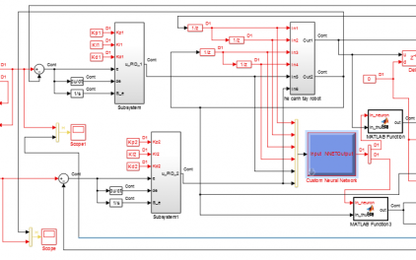
Điều khiển cánh tay robot hai bậc tự do qua mạng dựa trên phương pháp dự đoán Smith nâng cao
Bài báo nghiên cứu thiết kế mô hình điều khiển cánh tay máy hai bậc tự do qua mạng dựa vào phương pháp dự đoán Smith nâng cao.



