Liên hệ quảng cáo
Phát triển công cụ xử lý ảnh nhằm tính toán các đại lượng chuyển động và tương tác của xe khi lưu thông
Phần mềm SEV (Speed Estimation by Video technique) được xây dựng nhằm tính toán các đặc trưng chuyển động của xe, đặc biệt là xe gắn máy vốn rất chiếm ưu thế trong dòng xe tại nước ta, như quỹ đạo, vận tốc, gia tốc thông qua phương pháp sử dụng máy quay phim.
|
TS. Chu Công Minh Trường Đại học Bách khoa TP. Hồ Chí Minh Người phản biện: TS. Nguyễn Mạnh Tuấn TS. Trần Vũ Tự |
Tóm tắt: Phần mềm SEV (Speed Estimation by Video technique) được xây dựng nhằm tính toán các đặc trưng chuyển động của xe, đặc biệt là xe gắn máy vốn rất chiếm ưu thế trong dòng xe tại nước ta, như quỹ đạo, vận tốc, gia tốc thông qua phương pháp sử dụng máy quay phim. Phần mềm này sau đó được đánh giá sai số và cho kết quả trong phạm vi cho phép. Sản phẩm là kết quả đề tài nghiên cứu khoa học đã được nghiệm thu tại trường Đại học Bách khoa TP. Hồ Chí Minh
Từ khóa: Công cụ xử lý ảnh, chuyển động, tương tác.
Abstract: SEV (Speed Estimation by Video technique) was developed to calculate speeds, acceleration/deceleration and also measure trajectories of several vehicles silmuteneously, especially motorcycles which are a major means in traffic streams in Vietnam. This software was validated on-site with accepted errors. The software is the result of the accepted academic research at Hochiminh City University of Technology.
Keywords: Image analysis tool, movement, interactive.
1. Đặt vấn đề
Dữ liệu về giao thông như số lượng xe, vận tốc và phân loại xe rất quan trọng trong ứng dụng kỹ thuật trong giao thông, quy hoạch giao thông và hệ thống giao thông thông minh (ITS). Các thu thập các số liệu này từ trước đến nay tại nước ta là thu thập dữ liệu bằng mắt thường. Tuy nhiên, thu thập dữ liệu theo cách quan sát trực tiếp có số hạn chế bao gồm cả chi phí cao, thời tiết khắc nghiệt và khó khăn về hạn chế nhân sự. Mặt khác, việc thu thập số liệu bằng mắt thường có kết quả không tin cậy và cũng không chứng minh được kết quả. Mục đích chính của nghiên cứu này là xây dựng phần mềm tính toán các đặc trưng chuyển động của xe như quỹ đạo, vận tốc, gia tốc thông qua phương pháp sử dụng máy quay phim.
2. Các nghiên cứu trước đây
Đối với việc giám sát giao thông bằng hình ảnh thì phương pháp hiệu chỉnh camera (camera calibration) là bước rất quan trọng. Việc hiệu chỉnh này sẽ giúp giải quyết mối quan hệ giữa hệ tọa độ thực 3 chiều (điểm thực tế) và hệ tọa ảnh tương ứng 2 chiều (điểm xử lý bằng camera). Tác giả Fung và một số tác giả khác vào năm 2003 đã thể hiện mối quan hệ này bằng các thông số bên trong (intrinsic) và bên ngoài (extrinsic) của camera như tiêu cự (focal length), hệ số tỉ lệ (scale factor), góc quay ngang (pan angle), góc quay dọc (tilt angle)… Khi các thông số này được xác định ta có thể tính toán vị trí của các điểm trong tọa độ thực 3 chiều thông qua tọa độ ảnh 2 chiều và ngược lại. Năm 2002, Trajkovic đã giới thiệu một thuật toán để sử dụng cho việc hiệu chỉnh bên trong (internal) và bên ngoài (external) đối với camera PTZ (Pan-Tilt-Zoom) với mục đích là tính toán các thông số của camera như tiêu cự, khuôn dạng điểm ảnh, điểm chính và mối quan hệ giữa các điều chỉnh zoom (zoom settings) của camera với tiêu cự bằng cách giả thiết rằng chiều cao của camera là biết trước và điểm chính của camera và tâm quay của bộ phận pan và tilt là trùng nhau.
Đã có khá nhiều phương pháp hiệu chỉnh camera đã được đưa ra, các phương pháp này chỉ đưa ra các giải pháp từng phần để hiệu chỉnh một camera cho việc giám sát giao thông. Một số phương pháp sử dụng các mô hình hiệu chỉnh đặc biệt như dạng hình thoi, dạng lục giác để tính toán. Tuy nhiên, những hình dạng này hầu như không thể được tìm thấy trên bề mặt đường thực tế. Hơn nữa, chỉ có một phần các thông số của camera được sử dụng trong mỗi phương pháp như chiều cao camera, góc nhìn còn một số thông số khác lại bỏ qua như góc quay của camera. Điều này sẽ làm giảm khả năng hoạt động của phương pháp hiệu chỉnh bằng camera. Ngoài ra, những nghiên cứu khác về việc xử lý ảnh cho dòng giao thông với xe máy là chủ yếu đã được tiến hành ở nhiều nước phát triển nhưng không thể áp dụng được với các nước đang phát triển vì đặc điểm rất riêng của xe máy, khác hẳn với các loại phương tiện bốn bánh.
3. Phương pháp và nội dung nghiên cứu
3.1. Phương pháp chuyển đổi tọa độ sử dụng kỹ thuật hiệu chỉnh
Một trong những mục đích chính của việc quay lại cảnh giao thông là để xác định vị trí của xe một cách định kỳ hoặc vào một thời gian cụ thể. Việc thu thập, phân tích và xử lý số liệu được thực hiện theo hình vẽ sau:
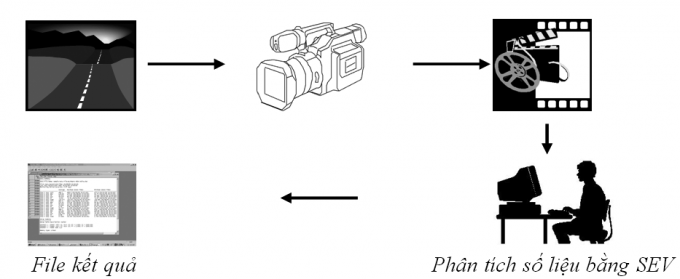 |
| Hình 3.1: Sơ đồ diễn tả quá trình thu thập, phân tích và xử lý số liệu |
Dựa vào phương pháp của các tác giả Sarosh I. Khan và Winai Raksuntorn (2001), nguyên tắc hình học (projective geometry) có thể được áp dụng để chuyển đổi tọa độ trên màng hình (screen coordinates) sang tọa độ thực tế (roadway coordinates) hoặc ngược lại. Căn cứ vào nguyên tắc này, tọa độ có thể được chuyển đổi giữa hai chuỗi xạ (projective sequences). Đối với phép xạ ảnh của các mặt phẳng, số lượng các tọa độ trên mỗi điểm là 2 và 2 biểu thức là cần thiết cho mỗi cặp điểm. Với mỗi cặp tọa độ x, y trên một mặt phẳng và x’, y’ trên một mặt phẳng khác, hay mỗi cặp tọa độ trên màng hình xs, ys và mỗi cặp tọa độ trên đường xr, yr ta có biểu thức:
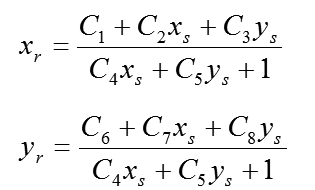 |
(1)
(2)
Trong đó: xr, yr - Tọa độ thực tế; xs, ys - Tọa độ màng hình; C1 đến C8 - Các hệ số.
Công thức (1) và (2) cần phải xác định 4 điểm đã biết ngoài thực tế để tính 8 công thức cùng lúc:
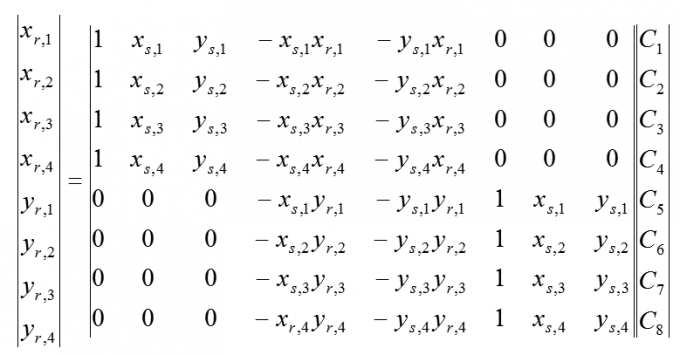 |
(3)
Các phương trình được giả quyết để xác định các hệ số đã được ước tính, các cặp tọa độ trên màn hình có thể chuyển đổi thành tọa độ thực tế. Phương pháp này đòi hỏi tối thiểu có 4 điểm đã được xác định từ trước ở ngoài hiện trường. Bốn điểm này đã được xác định tọa độ ngoài thực tế, đồng thời tọa độ các điểm này cũng được xác định trên hình máy tính.
3.2. Giới thiệu phần mềm xử lý ảnh SEV
Với phương pháp tính toán như đã trình bày phần trên, nhóm tác giả đã soạn thảo và cho ra đời phần mềm xử lý các thông tin trong dòng xe bằng phương pháp máy quay, mang tên là SEV. Phần mềm này có các đặc điểm vượt trội hơn các phần mềm hiện có như sau:
- Có thể tính toán quỹ đạo chuyển động của rất nhiều xe cùng lúc;
- Có khả năng tính toán nhiều vị trí của một xe theo những thời đoạn được ấn định trước nhỏ đến mức 1/30 giây;
- Có khả năng lặp lại nhiều lần để kiểm tra kết quả hoặc thu thập thêm số liệu hoặc loại bỏ những số liệu không cần thiết;
- Không cần nhiều thiết bị liên quan cũng như không cần nhiều nhân lực ngoài hiện trường và trong phòng thí nghiệm;
- Sử dụng dễ dàng.
Thanh công cụ của phần mềm SEV bao gồm File, Play và View. Các chức năng trong menu chính được dùng để mở, đóng file cần xử lý, cũng như thoát khỏi chương trình. Chức năng chính của thanh công cụ được dùng để tiến hành phân tích, xử lý và tính toán các đại lượng chuyển động trong file hình ảnh đang được phân tích. Để tính toán các đại lượng chuyển động của dòng xe, SEV có thể tính toán được các thông số như tọa độ, vận tốc, gia tốc đồng thời cho tối đa 6 chiếc xe.
 |
| Hình 3.2: Giao diện phần mềm xử lý ảnh SEV |
3.3. Cách thức hoạt động của phần mềm xử lý ảnh SEV
Việc đầu tiên là vào File, chọn video clip muốn phân tích, đảm bảo video clip có định dạng phù hợp để SEV có thể chạy được. Nên nhớ cài thêm phần mềm DirectX 10.0 để hỗ trợ chạy video trong Windows.
Để thực hiện việc tính toán các đại lượng chuyển động như quỹ đạo chuyển động, vận tốc, gia tốc của các xe, trước hết cần thiết phải định nghĩa hệ trục trong máy tính với một tỷ lệ đồng dạng với hệ trục ngoài thực tế. Để làm được việc này cần thiết phải xác định tối thiểu 4 điểm, các điểm này có các tọa độ trong máy tính tương ứng với tọa độ ngoài thực tế và được gọi là các điểm chuẩn (Base points). Click chuột phải (Right click) vào các điểm, đặt tọa độ ứng với tọa độ ngoài thực tế.
Sau đó, chọn bước thời gian phù hợp trong Interval (ví dụ 0,2, 0,5 giây). Bắt đầu tiến hành chạy video clip theo từng bước thời gian phù hợp bằng cách click vào nút Forward. Khi đó, sau mỗi bước thời gian, video clip sẽ tạm dừng lại để người sử dụng phân tích. Trong các khoảng dừng đó, click chuột phải để xác định các điểm (thông thường là một điểm cố định nào đó trên xe), sau đó click vào Calculator.
Tiếp tục click vào biểu tượng Forward, video clip lại tiếp tục chay ở khoảng thời gian Interval. Click chuột trái vào điểm trên xe (trùng với điểm trên xe đã click trước), tiếp tục click vào Calculator. Máy tính sẽ tính được tọa độ xe đó đã di chuyển theo 2 phương x, y, từ đó tính được quãng đường di chuyển, vận tốc, gia tốc của xe cần tính.
Tiến hành tương tự như vậy nhiều lần, ta sẽ có các giá trị tọa độ, vận tốc, gia tốc của tối đa 6 xe cần tính ở nhiều thời đoạn khác nhau. Sau khi kết thúc tính toán, hoặc do xe đã biến mất khỏi màn hình, click vào biểu tượng Save. Khi đó, dữ liệu tính toán sẽ được lưu ở định dạng file *.csv, tương thích Microsoft Excel. Vào Excel để chỉnh sửa hoặc phân tích dựa trên các dữ liệu đã thu thập được.
4. Kết quả nghiên cứu và bình luận
Việc thu thập dữ liệu được thực hiện trong khuôn viên Trường Đại học Bách khoa, đường Lý Thường Kiệt, quận 10, TP. Hồ Chí Minh, bằng cách như sau:
Một máy quay được đặt trên tòa nhà gần đoạn đường thử nghiệm, trục của máy quay vuông góc với hướng lưu thông tại vị trí thử nghiệm. Con đường được ghi hình là đường bê tông, thẳng, có bề rộng là 4m. Có 8 điểm được sơn màu sáng đặt hai bên đường để đánh dấu (mỗi bên 4 điểm). Bốn điểm ở hai đầu mép ngoài con đường (điểm đầu và điểm cuối) đã được sử dụng như điểm tham chiếu (base points) và các điểm khác ở hai bên đường được sử dụng để đánh dấu như các điểm đã biết (known points). Ngoài ra, độ dài đường ghi lại được thay đổi 6m, 9m, 10m. Việc ghi lại được thực hiện trong khoảng 120 phút. Việc đánh giá sai số của phần mềm SEV được thực hiện bằng hai giai đoạn:
4.1. Giai đoạn 1: Tính toán sai số các vị trí cố định trên thực địa
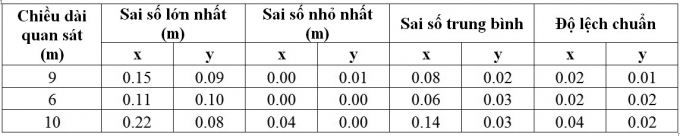
Kết quả sai số đã được kiểm tra với n = 10 và kết quả như sau:
Bảng 4.1. Sai số trong phần mềm SEV
 |
4.2. Giai đoạn 2: Tính toán sai số các vị trí di động (về vận tốc, gia tốc) của xe di chuyển trên thực địa
Hình 4.1 thể hiện độ lệch chuẩn của xe quan sát chạy với vận tốc 10km/h theo khoảng cách quan sát (16m và 25m) và theo bước thời gian (0,5, 1, 1,5, 2 giây). Từ hình vẽ cho thấy ứng với vận tốc 10km/h (2.78m/s) khi bước thời gian càng lớn, sai số về vận tốc càng nhỏ và ngược lại. Ngoài ra, sai số còn phụ thuộc vào khoảng cách quan sát. Ứng với khoảng quan sát càng lớn, sai số càng nhỏ và ngược lại. Nhìn trung, sai số về vận tốc trung bình rất thấp (dưới 7%).
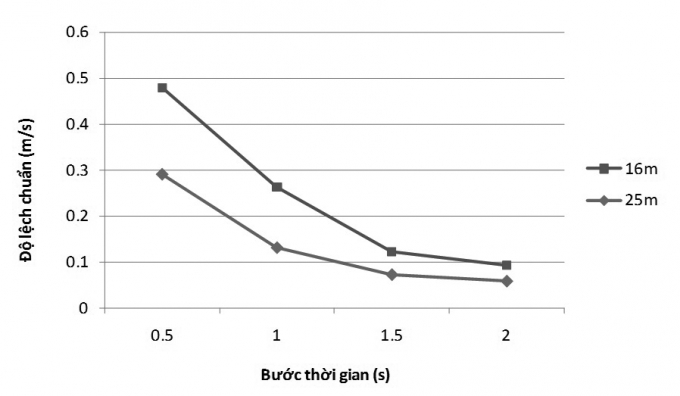 |
| Hình 4.1: Sai số về vận tốc của phần mềm SEV |
Hình 4.1 thể hiện độ lệch chuẩn của xe quan sát chạy với vận tốc 10km/h theo khoảng cách quan sát (16m và 25m) và theo bước thời gian (0,5, 1, 1,5, 2 giây). Tương tự như phần sai số về vận tốc, từ hình vẽ cho thấy ứng với vận tốc 10km/h (2,78m/s) khi bước thời gian càng lớn, sai số về gia tốc càng nhỏ và ngược lại. Ngoài ra, sai số còn phụ thuộc vào khoảng cách quan sát. Ứng với khoảng quan sát càng lớn, sai số càng nhỏ và ngược lại. Nhìn chung, sai số về vận tốc trung bình rất thấp (dưới 5%). Sai số chuẩn của vận tốc và gia tốc trình bày ở Hình 4.1 và Hình 4.2 cho thấy rằng, với việc xử lý các khung hình ảnh chuyển động trong khoảng thời gian tăng dần, sai số chuẩn của vận tốc và gia tốc hội tụ về giá trị rất thấp trong trường hợp chiều dài đường khác nhau. Đồng thời, giá trị của sai số nằm trong khoảng chấp nhận được (dưới 7%).
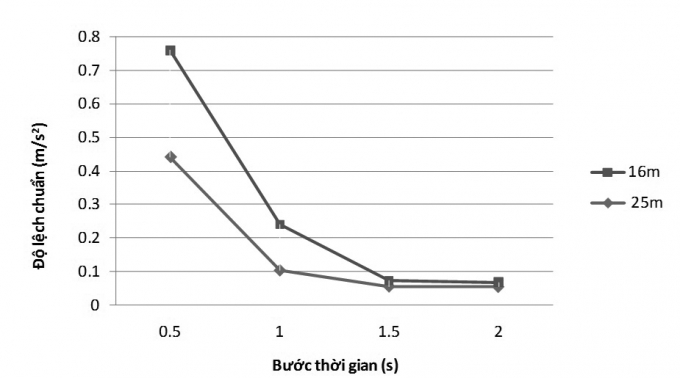 |
| Hình 4.2: Sai số về gia tốc của phần mềm SEV |
5. Kết luận
Nghiên cứu này đã xây dựng phần mềm SEV nhằm thực hiện việc tính toán quỹ đạo chuyển động, vận tốc tức thời, gia tốc chuyển động, khoảng không gia tương đối để xe di chuyển trong dòng… bằng phương pháp xử lý ảnh. Sự di chuyển của xe ngoài thực tế được ghi lại bằng máy quay, với sự giúp đỡ của phần mềm SEV, các đại lượng chuyển động của xe được phân tích, tính toán và có thể dễ dàng lưu dưới dạng file tương thích Microsoft Excel.
Phần mềm cũng được đánh giá độ chính xác thông qua việc phân tích số liệu thu thập tại Trường Đại học Bách khoa TP. Hồ Chí Minh. Độ chính xác được kiểm chứng ở hai giai đoạn, giai đoạn 1 (các điểm cố định) và giai đoạn 2 (các điểm di động). Sai số nhận được cũng nằm trong khoảng 7%. Sai số này do nhiều yếu tố quyết định như do thuật giải của phần mềm, do mắt người khi click trên màn hình máy tính, do người lái xe ngoài thực tế không chạy đúng vận tốc cho trước… Do thời gian có hạn, phần mềm SEV này còn một số hạn chế như việc xử lý ảnh còn phụ thuộc vào mắt người và click bằng tay lên màn hình mà không thể bắt điểm tự động. Đây cũng chính là một hướng nghiên cứu cho các đề tài tiếp theo.
Tài liệu tham khảo
[1]. Fung, G. S. K., Yung, N. H. C., and Pang, G. K. (2003), Camera calibration from road lane markings, Optical Engineering, vol. 42, pp. 2967-2977.
[2]. Trajkovic, M., (2002), Interactive calibration of a PTZ camera for surveillance applications, in Asian Conference on Computer Vision, pp. 1-8.
[3]. Khan, S. I., Raksuntorn, W. (2001), Accuracy of Numerical Rectification of Video Images to Analyze Bicycle Traffic Scenes, Transportation Research Record: Journal of the Transportation Research Board, Vol. 1773, pp. 32-38.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.