Liên hệ quảng cáo
Điều khiển robot tự hành bằng phương pháp điều khiển hành vi dựa trên không gian rỗng
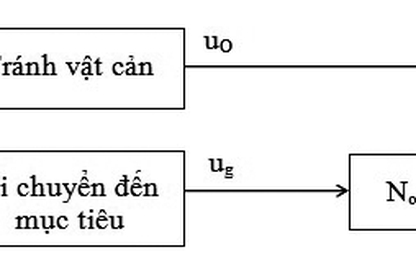
Bài báo đã phát triển một mô hình robot tự hành hoạt động trong môi trường có vật cản để tìm kiếm mục tiêu dựa trên cơ sở phân cấp các nhiệm vụ.



