Liên hệ quảng cáo
Xây dựng mô hình toán đánh giá hiệu quả làm việc tối ưu kênh thông tin của hệ thống vệ tinh định vị toàn cầu GPS
Bài báo xây dựng mô hình toán trên cơ sở nhóm chỉ tiêu kỹ thuật an toàn hàng hải gồm: Hệ số kênh thông tin bảo vệ, xác suất truyền tín hiệu thông tin hàng hải và hệ số cấu trúc tổ hợp tối ưu để tính toán cụ thể hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống định vị vệ tinh toàn cầu GPS.
|
ª PGS. TS. Phạm Kỳ Quang Trường Đại học Hàng hải Việt Nam ª TS. Nguyễn Xuân Phương Trường Đại học Giao thông vận tải TP. Hồ Chí Minh Người phản biện: TS. Phạm Văn Phước PGS. TS. Nguyễn Kim Phương |
Tóm tắt: Bài báo xây dựng mô hình toán trên cơ sở nhóm chỉ tiêu kỹ thuật an toàn hàng hải gồm: Hệ số kênh thông tin bảo vệ, xác suất truyền tín hiệu thông tin hàng hải và hệ số cấu trúc tổ hợp tối ưu để tính toán cụ thể hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống định vị vệ tinh toàn cầu GPS.
Từ khóa: Hệ thống định vị toàn cầu GPS.
Abstract: The article created the mathematical model by using group technical standards of safety navigation. There are the factor of protection information channels (Kbv-SBAS), the maritime communication probability (Pth) and the factor of the GPS’ structural optimization (ε*) for calculating the effective operation of information channels of Global Position System.
Keywords: Global positioning system GPS.
1. Đặt vấn đề
Hệ thống vệ tinh định vị toàn cầu GPS (Global Position System) được ứng dụng rộng rãi trong nhiều thập niên và nhiều lĩnh vực khác nhau, đặc biệt trong các lĩnh vực hàng hải, hàng không, thăm dò, địa chất, khai khoáng, xây dựng, giao thông, công trình… Hệ thống GPS là bộ phận cơ bản của hệ thống vệ tinh dẫn đường toàn cầu GNSS (Global Navigation Satellite System) do Bộ Quốc phòng Hoa Kỳ xây dựng, phát triển và quản lý. Hệ thống GPS gồm có 3 khâu: Khâu vũ trụ, khâu điều khiển, khâu sử dụng [3].
Một trong những ứng dụng rộng rãi hệ thống GPS trong hàng hải là xác định vị trí tàu biển. Nguyên lý chung là sử dụng phương pháp đo khoảng cách tới vệ tinh S1 được giá trị D1. Vị trí tàu sẽ nằm trên mặt cầu, có tâm là vị trí vệ tinh, bán kính là khoảng cách đo được (S1, D1). Mặt cầu đẳng trị giao với bề mặt trái đất cho đường đẳng trị khoảng cách, đồng thời đo khoảng cách tới các vệ tinh khác sẽ nhận được các đường đẳng trị khoảng cách tương ứng. Giao của các đường đẳng trị khoảng cách cho vị ví tàu chính xác (Hình 1.1). Thực tế, dựa trên nguyên tắc chung này, hệ thống định vị hàng hải có các phương pháp khác nhau để tính toán tọa độ của vị trí tàu xác định [3].
Trong khuôn khổ bài báo, nhóm tác giả xây dựng mô hình toán để tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS theo nhóm chỉ tiêu kỹ thuật an toàn hàng hải, khi có ảnh hưởng của nhiễu vô tuyến. Hơn nữa, xét trong trường hợp thông tin hàng hải trong kênh thông tin của hệ thống GPS theo chiều nhận tín hiệu hàng hải từ vệ tinh GPS đến trạm thu trên tàu biển.
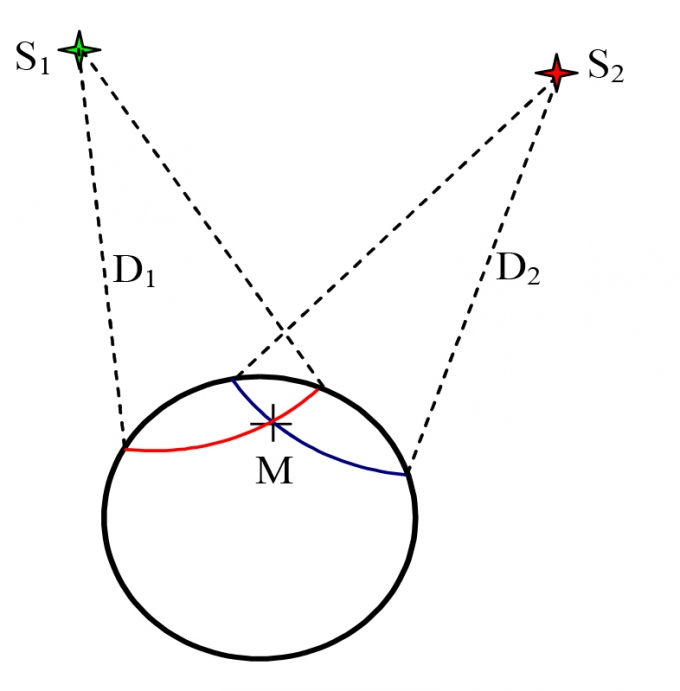 |
| Hình 1.1: Nguyên lý chung xác định vị trí tàu |
2. Xây dựng mô hình toán để tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS theo nhóm chỉ tiêu kỹ thuật an toàn hàng hải
Thiết lập mô hình toán để tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS, bài báo sử dụng nhóm chỉ tiêu kỹ thuật an toàn hàng hải, gồm 3 chỉ tiêu sau: Hệ số kênh thông tin bảo vệ, xác suất truyền tín hiệu thông tin hàng hải và hệ số cấu trúc tổ hợp tối ưu, trong kênh thông tin của hệ thống định vị vệ tinh toàn cầu GPS.
- Chỉ tiêu kỹ thuật an toàn hàng hải "Hệ số kênh thông tin bảo vệ, ký hiệu Kbv-GPS" trong kênh thông tin của hệ thống định vị toàn cầu GPS xét trong trường hợp ảnh hưởng của nhiễu vô tuyến, được đặc trưng bằng số và tính theo công thức [1, 2, 4, 5, 6]:
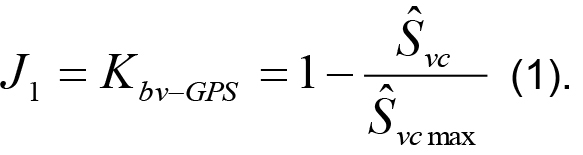 |
Trong đó:
` ` vc - Diện tích vùng chết tín hiệu thông tin hàng hải; ` ` vcmax - Diện tích giới hạn lớn nhất vùng chết tín hiệu thông tin trong kênh thông tin của hệ thống GPS và giá trị
` ` vcmax = 441(đơn vị diện tích).
Theo kết quả nghiên cứu [1, 3, 4], thực hiện mô hình hóa diện tích vùng chết tín hiệu thông tin hàng hải trong kênh thông tin của hệ thống GPS khi ảnh hưởng nhiễu vô tuyến nhận ` ` vc = 264,6(đơn vị diện tích), đồng thời kết hợp giá trị này với (1), tính được miền tối ưu của hệ số kênh thông tin bảo vệ Kbv-GPS trong kênh thông tin của hệ thống GPS khi ảnh hưởng của nhiễu vô tuyến là:
0,40 ` ` (Kbv-GPS) ` ` 1,0 (2)
- Chỉ tiêu “Xác suất truyền tín hiệu thông tin hàng hải”trong kênh thông tin của hệ thống GPS, được đặc trưng bằng xác suất lỗi (Pth) và đảm bảo rằng, thời gian truyền tín hiệu thông tin trong hệ thống (t) luôn luôn nhỏ hơn thời gian giới hạn (tgh) [1, 2, 4, 5]:
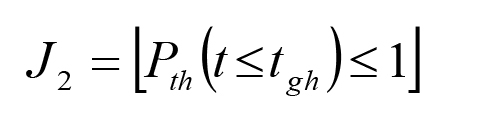 |
(3)
- Hệ số cấu trúc tối ưu trong tổ hợp cấu trúc của hệ thống GPS tính theo công thức: ` ` * = 1/(1 + 1g` ` )
Trong đó: ε - Chỉ tiêu hiệu quả trong kênh thông tin của hệ thống GPS.
Trong [4, 6] đã chứng minh rằng, kênh thông tin của hệ thống GPS hoạt động hiệu quả khi hệ số cấu trúc của nó tồn tại các giá trị ε* = 0,543, 0,624 và 0,676. Lựa chọn trong số đó hệ số tối ưu nhất là:
J3 = ε* = 0,676 (4)
Hiệu quả làm việc tối ưu của hệ thống mỗi hệ thống GPS (Q) có thể xác định theo công thức [1, 2, 4]:
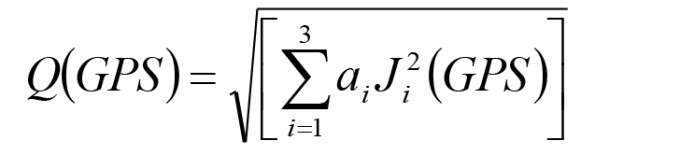 |
(5)
Trong đó: ai - Hệ số chỉ tiêu chất lượng ứng với từng Ji của hệ thống GPS và đảm bảo rằng ` ` ai = 1 .
Theo kết quả nghiên cứu [2, 4], giá trị a2 = 0,4 và giá trị còn lại sẽ biến đổi trong khoảng 0,1 ` ` a1,3 ` ` 0,5. Trên cơ sở lý luận từ (1), (2), (3), (4) và (5), thiết lập mô hình toán như sau:
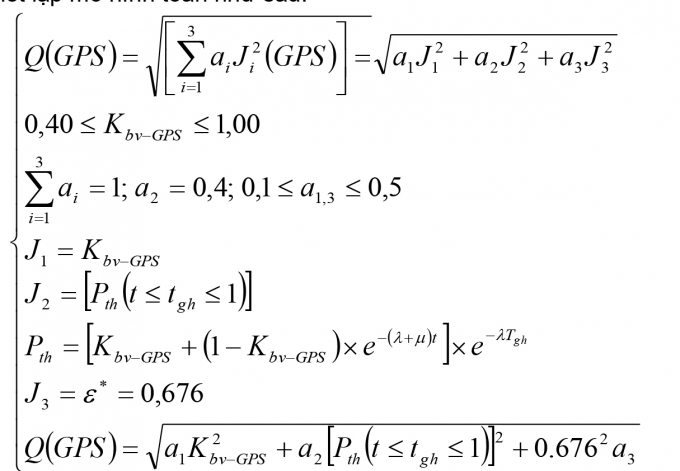 |
(6)
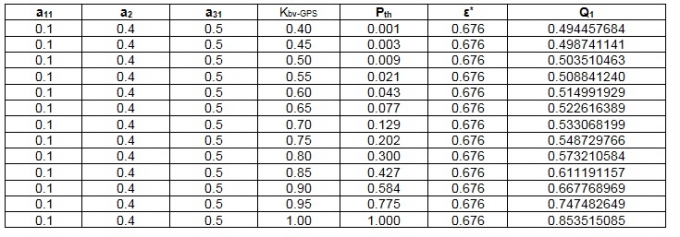
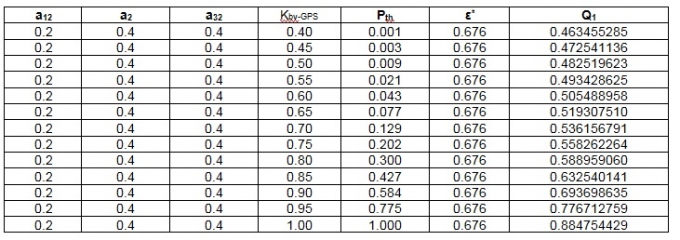
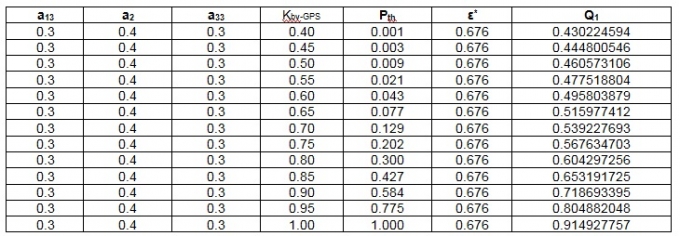
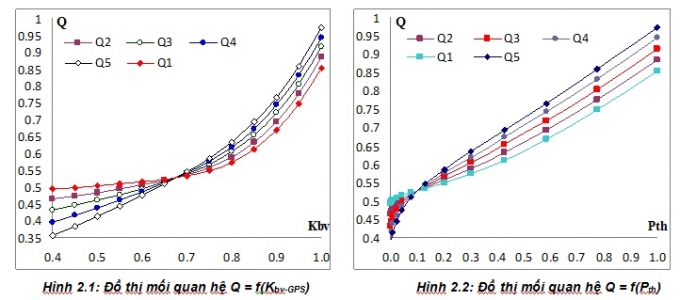
Sử dụng chương trình tính toán “Excel” đối với mô hình toán (6). Kết quả tính toán cụ thể giá trị hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS theo nhóm chỉ tiêu kỹ thuật an toàn hàng hải, được đưa ra trong các Bảng 2.1 - 2.5. Đồng thời, Hình 2.1 và Hình 2.2 mô tả đồ thị mối quan hệ hiệu quả làm việc tối ưu của hệ thống GPS phụ thuộc vào từng chỉ tiêu kỹ thuật an toàn hàng hải.
Bảng 2.1. Kết quả tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS khi a11 = 0,1, a31 = 0,5
 |
Bảng 2.2. Kết quả tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS khia12 = 0,2, a32 = 0,4
 |
Bảng 2.3. Kết quả tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS khia13 = 0,3, a33 = 0,3
 |
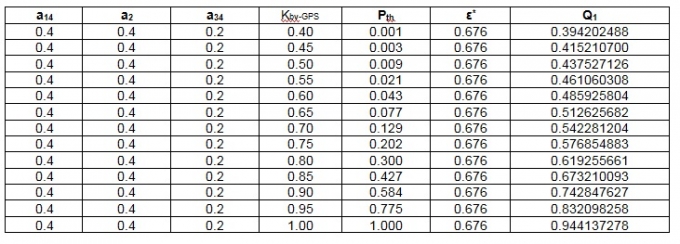
Bảng 2.4. Kết quả tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS khia14 = 0,4, a34 = 0,2
 |
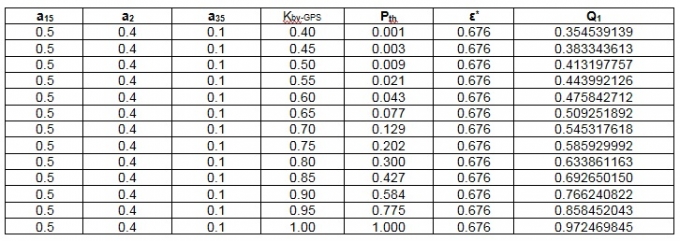
Bảng 2.5. Kết quả tính toán hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS khia15 = 0,5, a35 = 0,1
 |
 |
3. Kết luận
Phân tích cụ thể các giá trị trong các Bảng 2.1 - 2.5 và đồ thị từ Hình 2.1 và Hình 2.2, rút ra kết luận:
- Từ điểm giao nhau của các đường về phía bên phải của đồ thị (Khi Kbv-GPS > 0,65 và Pth ³ 0,1), hiệu quả làm việc tối ưu trong kênh thông tin của hệ thống GPS có dạng gần như đường thẳng, phụ thuộc chặt chẽ từng thành phần trong nhóm chỉ tiêu kỹ thuật an toàn hàng hải. Với chỉ tiêu ε* không đổi, giá trị hiệu quả Q trong kênh thông tin phụ thuộc thuộc chẽ vào chỉ tiêu Kbv-GPS và xác suất Pth. Nghĩa là, khi chỉ tiêu Kbv-GPS và xác suất Pth tăng thì hiệu quả làm việc cũng tăng theo. Tại điểm giao nhau của đồ thị, hiệu quả làm việc trong kênh thông tin của hệ thống GPS bắt đầu tăng và tăng nhanh và rõ rệt khi 0,95 ` ` Kbv-GPS ` ` 1,00 và 0,90 ` ` Pth ` ` 1,00, hiệu quả làm việc trong kênh thông tin của hệ thống GPS có thể đạt trên 95% (Bảng 2.5).
- Từ điểm giao nhau của các đường về phía bên trái của đồ thị, hiệu quả làm việc trong kênh thông tin, phụ thuộc chặt chẽ từng thành phần trong nhóm chỉ tiêu kỹ thuật an toàn hàng hải. Nghĩa là khi chỉ tiêu Kbv-GPS và xác suất Pth tăng thì hiệu quả làm việc cũng tăng theo nhưng hiệu quả làm việc trong kênh thông tin của hệ thống GPS không quá 50%, từ đó không xét trường hợp này.
Tài liệu tham khảo
[1]. PGS. TS. Phạm Kỳ Quang (chủ bin), PGS. TS. Đinh Xun Mạnh (2014),Lý thuyết độ tin cậy hng hải, NXB. Hng hải.
[2]. Фам Ки Куанг (2010),Исследование влияния электромагнитной защищённости информационных каналов широкозонных дифференциальных подсистем на точность мониторинга и управления движением судов, Санкт-Петербургский государственный университет водных коммуникаций, с.169.
[3]. TS. TTr. Phạm Kỳ Quang, ThS. TTr. Nguyễn Thi Dương, TS. TTr. Nguyễn Phng Hưng (2012), Giotrình ĐịavănHnghải, tập 1, 2, 3, NXB. Khoa học kỹ thuật, NXB. GTVT.
[4]. Ю.Г. Вишневский (2006), А.А. Сикарев, Поля поражения сигналов и электромагнитная защищённость информационных каналов в АСУДС. - М.: СПб “Судостроение”, - 356 с.
[5]. Phạm Kỳ Quang (6/2009),Ảnh hưởng hệ số knh thơng tin bảo vệ điện từ trường trong hệ thống vi sai hng hải khu vực rộng đối với hiệu quả của hệ thống tự động chuyển động tu thủy, Tạp chí Khoa học - Cơng nghệ Hng hải, № 18, trang 27 - 32.
[6]. Ю. Г. Вишневский (2008), Оценка эффективности структуры автоматизированной системы управления движением судов,Программные продукты и системы, вып. 2(82), с. 75-76.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.