Liên hệ quảng cáo
Nghiên cứu chế tạo thiết bị đo sâu phục vụ công tác khảo sát, cảnh báo an toàn cho tàu thuyền theo tiến trình nội địa hóa sản phẩm
Một trong những thiết bị không thể thiếu của mỗi con tàu đó là máy đo sâu hàng hải - dụng cụ dùng để xác định độ sâu vùng nước tàu đang hoạt động.
|
TS. Chu Xuân Nam Trường Cao đẳng GTVT III Người phản biện: PGS. TS. Vũ Ngọc Bích |
TÓM TẮT: Một trong những thiết bị không thể thiếu của mỗi con tàu đó là máy đo sâu hàng hải - dụng cụ dùng để xác định độ sâu vùng nước tàu đang hoạt động. Khi tàu bị nghiêng thì máy thu phát sóng âm cũng bị nghiêng theo. Khi đó, sóng âm phát ra không còn được vuông góc với đáy biển nên sóng âm phản xạ trở lại cũng không còn được chính xác. Hơn nữa, khi có sóng gió lớn, mũi tàu va đập rất mạnh vào sóng biển làm cho có nhiều bọt khí trộn lẫn vào nước biển và bọt khí chạy qua đáy tàu. Các bọt khí này sẽ làm giảm hiệu quả phát sóng siêu âm của bộ tạo dao động, tán xạ sóng âm bị yếu đi. Do đó, việc đo sâu khi tàu chạy là điều thách thức. Bài báo đề xuất phương pháp nghiên cứu và chế tạo máy đo sâu hồi âm. Nhược điểm về các yếu tố độ nghiêng của tàu, sự chuyển động của tàu gây ra sai số đo sẽ được giải quyết thông qua bài toán thiết kế hệ thống tự chỉnh định thích nghi tham số của thiết bị đo nhằm giảm thiểu sai số đo đến mức có thể.
TỪ KHÓA: Đo sâu hồi âm, PID, thích nghi.
ABSTRACT: One of the indispensable equipment of every ship is deep marine gauges which are used to determine the depth of the waters. When the ship tilting, the sound wave transceiver is also tilting. As the emitted sound waves are not perpendicular to the seabed, reflected waves are not accurate either. Moreover, large waves create strong bow shock and the air bubbles, which makes seawater mixed and air bubbles run through the bilge. These air bubbles will reduce the efficiency of broadcasting ultrasonic generator and weaken the scattering of sound waves. Therefore, gauging while the ship is operating is a challenge. This paper proposes the research methodology on how to manufacture echo sounders. The problems of ship tilting, measurement errors caused by the ship movement will be addressed through the self-tuning system parameters to minimize measurement errors at most.
KEYWORDS: Echo sounder, PID, adaptive.
1. ĐẶT VẤN ĐỀ
Sản lượng hàng hóa vận tải của ngành GTVT Đường thủy nội địa luôn chiếm 40% - 45% tổng sản lượng vận tải nội địa. Vận tải đường thủy còn cho phép vận chuyển hàng hóa siêu trường, siêu trọng, khối lượng lớn... với giá rẻ và thuận lợi.
Thực tế hiện nay, nước ta còn tồn tại rất nhiều dòng sông bị bồi lắng, chưa thể nạo vét phù hợp với cấp kỹ thuật của tuyến đường thủy nội địa. Ngoài ra, triều cường thường xuyên lên xuống ở một số sông cũng gây khó khăn cho các tàu thuyền trong việc dự báo hành trình di chuyển trong nội địa [1][2].
Để giám sát và dự báo hành trình di chuyển đòi hỏi các tàu thuyền phải trang bị máy đo sâu. Tuy nhiên, do các thiết bị đo sâu nhập khẩu từ nước ngoài có giá thành rất cao, nhiều thiết bị hoặc không phù hợp với điều kiện sử dụng cho các tàu nhỏ ở Việt Nam hoặc công năng quá dư thừa gây lãng phí. Vì vậy, nghiên cứu, thiết kế thiết bị đo sâu phục vụ công tác khảo sát, cảnh báo an toàn cho tàu thuyền theo tiến trình nội địa hóa sản phẩm là điều cần thiết.
Trong nước, máy đo sâu hàng hải đã được thiết kế chế tạo [5]. Máy có thể đo được độ sâu tối đa là 320m, có thể lựa chọn các thang đo độ sâu khác nhau, có chế độ điều chỉnh khuyếch đại của tín hiệu phản hồi, tránh ảnh hưởng của nhiễu tác động gây sai số khi đo độ sâu. Tuy nhiên, phương pháp đo chưa sử dụng công nghệ cảm biến hồi âm, phần hiển thị vẫn dùng phương pháp ghi độ sâu trên băng giấy.
Từ các yêu cầu trên, nghiên cứu chế tạo thiết bị đo sâu phục vụ công tác khảo sát, cảnh báo an toàn cho tàu thuyền theo tiến trình nội địa hóa sản phẩm là cần thiết. Thiết bị chế tạo sẽ sử dụng ưu điểm của phương pháp đo sâu hồi âm [7], [8]. Nhược điểm về các yếu tố độ nghiêng của tàu, sự chuyển động của tàu gây ra sai số đo sẽ được giải quyết thông qua bài toán thiết kế hệ thống tự chỉnh định thích nghi tham số của thiết bị đo nhằm giảm thiểu sai số đo đến mức có thể.
Phương pháp nghiên cứu trong bài báo bao gồm tổng hợp tài liệu có liên quan đến máy đo sâu hồi âm, sau đó phân tích thiết kế, chế tạo hệ thống và thực nghiệm thực tế. Trong suốt quá trình nghiên cứu, các tài liệu, qui chuẩn và qui phạm sau sẽ được sử dụng: Tiêu chuẩn Kỹ thuật của Tổ chức Hàng hải Thế giới (IMO Resolution MSC.xx) với phiên bản IMO Resolution MSC 328(90) [16], Sổ tay Hàng hải [3], Tiêu chuẩn Việt Nam…, lý thuyết máy đo sâu hồi âm và sổ tay kỹ thuật các máy đo sâu hiện có trên thế giới.
Nghiên cứu này đóng góp các điểm mới: Máy đo sâu tự hiệu chỉnh độ nghiêng của trục cảm biến, do đó khắc phục được các sai số phép đo do trục cảm biến thu phát sóng âm bị nghiêng (khi tàu nghiêng, hiện tượng sóng âm phát ra không vuông góc với đáy biển nên sóng âm phản xạ trở lại không chính xác; nội địa hóa sản phẩm, từng bước làm chủ công nghệ chế tạo máy đo độ sâu trong nước. Giá thành máy đo chế tạo rẻ hơn so với ngoại nhập và không phụ thuộc vào công nghệ chế tạo nước ngoài.
2. PHÂN TÍCH, THIẾT KẾ MÁY ĐO SÂU HỒI ÂM
2.1. Cấu trúc và chức năng của các thành phần trong hệ thống đo sâu hồi âm
Theo sơ đồ cấu trúc trên Hình 2.1, máy đo sâu hồi âm gồm các thành phần sau:
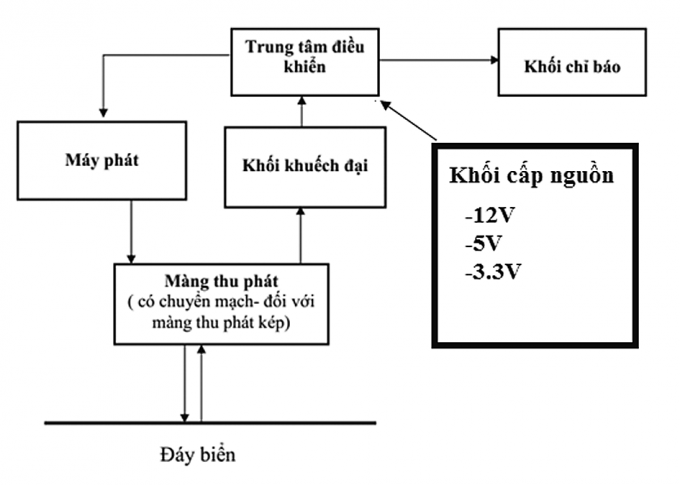 |
| Hình 2.1: Sơ đồ cấu trúc máy đo sâu hồi âm |
Khối nguồn: Có nhiệm vụ chuyển đổi nguồn điện của tàu thành các dạng điện áp phù hợp để cung cấp cho sự hoạt động của máy đo sâu. Khối điều khiển: Có nhiệm vụ điều khiển sự hoạt động thống nhất toàn bộ máy đo sâu và hiển thị độ sâu đo được. Trong thời gian phát xung thì mạch thu ngừng hoạt động và khi phát xong thì lập tức chuyển sang thu tín hiệu phản xạ trở về. Bộ hiển thị (chỉ báo): Giá trị độ sâu được hiển thị bằng số tương ứng với đơn vị độ sâu đã chọn. Khối thu phát: Có nhiệm vụ tạo xung siêu âm phát vuông góc với đáy tàu về phía đáy biển và thu tín hiệu phản xạ trở về, biến nó thành tín hiệu điện để chuyển tới khối điều khiển và chỉ báo. Khối này thường gồm bộ tạo xung điện áp và bộ khuếch đại.
2.2. Phân tích, thiết kế máy đo sâu hồi âm
Sơ đồ các thành phần của máy đo sâu được biểu diễn trên Hình 2.2. Các thành phần được kết nối vật lý với nhau tạo nên một hệ thống đo hoàn chỉnh.
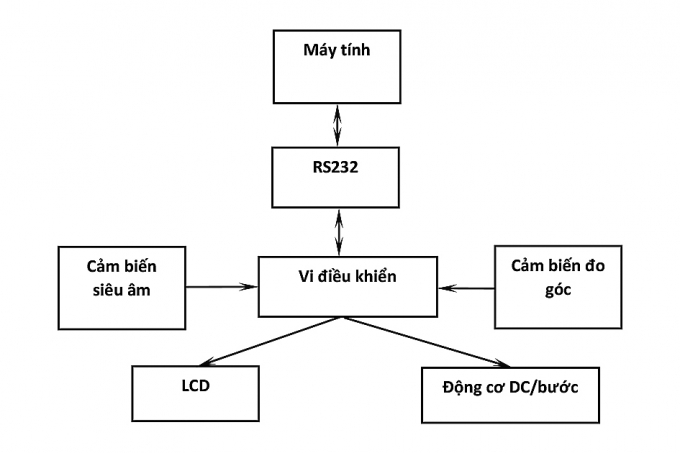 |
| Hình 2.2: Sơ đồ các thành phần của máy đo sâu |
2.2.1. Thiết kế phần cứng
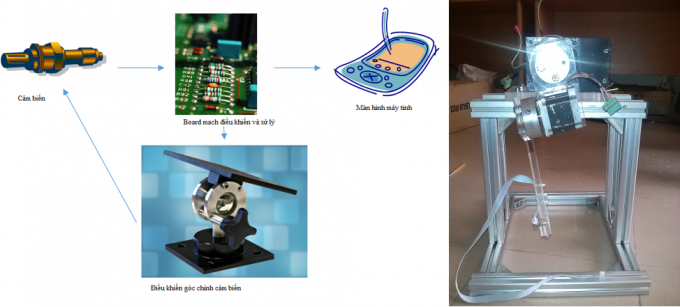
Sơ đồ nguyên lý phần cứng được đề xuất trên Hình 2.3a với khung cơ khí được trình bày trên Hình 2.3b. Phần cơ khí được thiết kế sao cho trục ngang liên kết với trục dọc của cảm biến phải di chuyển được theo 2 trục X-Y để đảm bảo điều chỉnh được độ nghiêng trục.
 |
|
a) b) Hình 2.3: Sơ đồ phần cứng |
Cảm biến sử dụng trong hệ thống là cảm biến siêu âm tần số kép (40-200) KHz, mã hiệu TD40200D có thể đo được độ sâu trong nước trên 200m.
 |
|
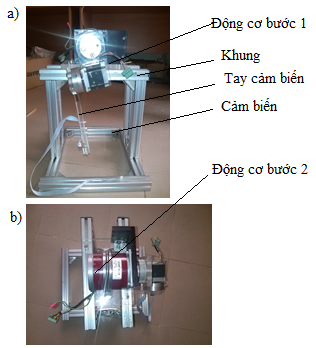
a) - Nhìn bên cạnh b) - Nhìn từ trên Hình 2.4: Hình ảnh máy đo sau khi chế tạo |
Máy đo sau khi chế tạo có hình dáng như Hình 2.4 và các thông số và đặc trưng kỹ thuật được trình bày theo Bảng 2.1:
Bảng 2.1. Thông số máy đo chế tạo
|
Thông số kỹ thuật |
Đơn vị đo |
Cần đạt |
|
Kích thước (dài x rộng x cao) |
mm |
400 x 300x 150 |
|
Trọng lượng |
kg |
10 |
|
Chiều dài xung: Được lựa chọn tự động với khoảng lựa chọn rộng với tần số phát xung |
KHz |
200 |
|
Sử dụng động cơ bước điều chỉnh tự động độ lệch trục cảm biến |
24 |
|
|
Giải độ sâu chia thành nhiều thang |
0.39 – 220 (MAX) |
|
|
Phân giải độ sâu |
cm |
|
|
Độ chính xác |
+/-0.1% toàn thang đo |
|
|
Nguồn điện |
220 VAC / 24 VDC |
|
|
Cổng kết nối |
bps |
RS-232, baud rate: 1200-115200 |
|
Kết nối với các thiết bị |
|
Máy In, bàn phím, chuột, USB 2.0, LCD |
|
Ngôn ngữ sử dụng |
|
Tiếng việt |
|
Gói phần mềm |
|
Cài đặt và chạy được trên nền hệ điều hành Windows, Giao diện thân thiện, dễ tương tác với người dùng |
2.2.2. Phần mềm nhúng
Phần mềm nhúng có nhiệm vụ đọc tín hiệu cảm biến siêu âm và xử lý, sau đó truyền tín hiệu lên máy vi tính. Trong nghiên cứu, chúng tôi đã chọn Visual Studio 2010 để thực hiện việc điều khiển Arduino qua máy tính, tạo giao diện dễ dàng cho người sử dụng, thu thập dữ liệu và điều khiển các mô-đun. Giao diện chính của phần mềm như Hình 2.5:
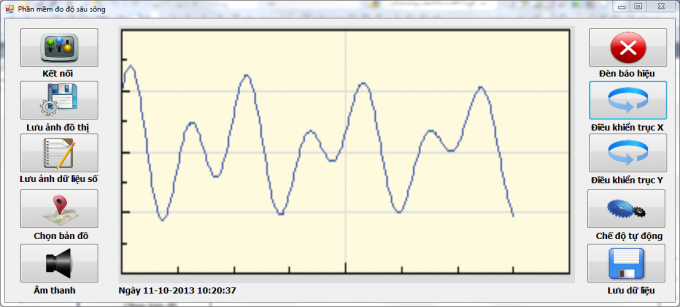 |
| Hình 2.5: Giao diện chương trình chính |
2.2.3. Thuật toán điều khiển PID trục cảm biến
Thuật toán PID điều khiển trục cảm biến: Một bộ điều khiển vi tích phân tỉ lệ (bộ điều khiển PID) là một cơ chế phản hồi vòng điều khiển (bộ điều khiển) tổng quát được sử dụng rộng rãi trong các hệ thống điều khiển công nghiệp - bộ điều khiển PID được sử dụng phổ biến nhất trong số các bộ điều khiển phản hồi. Một bộ điều khiển PID tính toán một giá trị “sai số” là hiệu số giữa giá trị đo thông số biến đổi và giá trị đặc biệt mong muốn. Bộ điều khiển sẽ thực hiện giảm tối đa sai số bằng cách điều chỉnh giá trị điều khiển đầu vào. Trong trường hợp không có kiến thức cơ bản về quá trình, bộ điều khiển PID là bộ điều khiển tốt nhất. Tuy nhiên, để đạt được kết quả tốt nhất, các thông số PID sử dụng trong tính toán phải điều chỉnh theo tính chất của hệ thống - trong khi kiểu điều khiển là giống nhau, các thông số phải phụ thuộc vào đặc thù của hệ thống.
Khâu tỉ lệ, tích phân, vi phân được cộng lại với nhau để tính toán đầu ra của bộ điều khiển PID. Định nghĩa rằng u(t) là đầu ra của bộ điều khiển, biểu thức cuối cùng của giải thuật PID là:
 |
Trong đó: Độ lợi tỉ lệ Kp - Trị càng lớn thì đáp ứng càng nhanh, do đó sai số càng lớn, bù khâu tỉ lệ càng lớn. Một giá trị độ lợi tỉ lệ quá lớn sẽ dẫn đến quá trình mất ổn định và dao động; Độ lợi tích phân Ki - Giá trị càng lớn kéo theo sai số ổn định bị khử càng nhanh. Đổi lại là độ vọt lố càng lớn, bất kỳ sai số âm nào được tích phân trong suốt đáp ứng quá độ phải được triệt tiêu tích phân bằng sai số dương trước khi tiến tới trạng thái ổn định; Độ lợi vi phân Kd - Giá trị càng lớn càng giảm độ vọt lố, nhưng lại làm chậm đáp ứng quá độ và có thể dẫn đến mất ổn định do khuếch đại nhiễu tín hiệu trong phép vi phân sai số.
Lưu đồ thuật toán điều khiển PID với các tham số Kp, Ki, Kd được thiết kế dùng phương pháp thử và sai.
3. THỰC NGHIỆM
Các thông số của máy đo cần phải thực nghiệm để kiểm chứng tính đúng đắn sau khi thiết kế và chế tạo, các thông số định lượng còn lại như kích thước máy, nguồn điện, cổng kết nối… phù hợp với mục tiêu đặt ra ban đầu. Để so sánh kết quả đo của máy, sử dụng thiết bị kiểm chuẩn do hãng Solinst- Canada sản xuất. Đây là máy đo khoảng cách dùng phương pháp bán thủ công cho kết quả khá chính xác.
3.1. Thiết lập thực nghiệm
Quy trình kiểm nghiệm đo tuân thủ theo các bước sau [15]:
Bước 1: Tần số phát xung cài đặt vào vi xử lý là 200KHz. Bước 2: Sau khi chọn vị trí đo, cần tiến hành kiểm tra tính ổn định của hệ thống theo thời gian. Bước 3: Sử dụng máy đo tốc độ âm đo được tốc độ âm thanh tại nơi kiểm nghiệm, nhập số liệu đã đo vào máy đo sâu. Bước 4: Thả đầu đo máy kiểm tra xuống độ sâu mà máy có thể đo được. Ghi nhận giá trị độ sâu trên màn hình LCD. Độ sâu này được kiểm tra lại bằng thước với độ chính xác 0,5cm; Bước 5: Đo độ sâu tại vị trí mà máy kiểm tra đo được bằng máy đo sâu của đề tài. Bước 6: Tính độ lệch hệ thống của máy bằng hiệu của độ sâu kiểm tra với độ sâu trung bình đo bằng máy đo sâu của đề tài, sau khi đã loại các số liệu sai thô. Bước 7: Nhập số liệu hiệu chỉnh độ lệch hệ thống đã tính vào máy đo sâu. Bước 8: Bảng đáp ứng kỹ thuật các chỉ tiêu trên so với tài liệu kỹ thuật của máy.
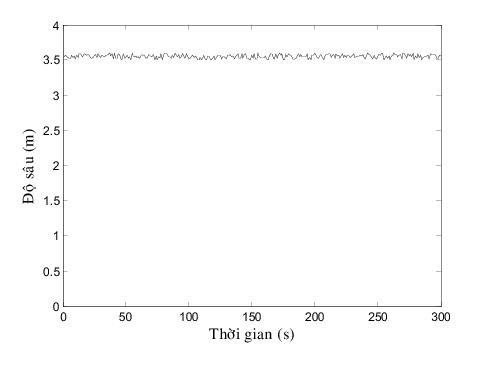 |
| Hình 3.1: Kết quả đo sâu tại một vị trí |
3.2. Kết quả thực nghiệm
Kiểm tra tính ổn định của hệ thống theo thời gian được thực hiện như sau: Máy đo được đặt cố định tại vị trí đo, dữ liệu đo theo thời gian thực được thu thập, đồ thị được vẽ để kiểm tra khả năng đọc dữ liệu từ cảm biến, xử lý dữ liệu của bộ thu nhận. Trên Hình 3.1 ta thấy, ở trạng thái xác lập kết quả đo rất ổn định với các giá trị thống kê như sau:
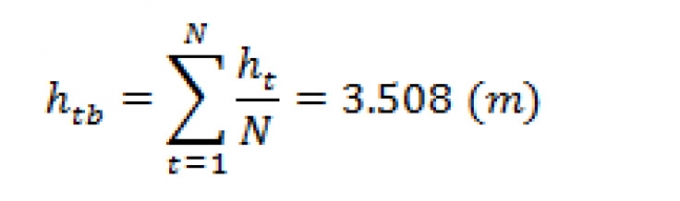 |
(2)
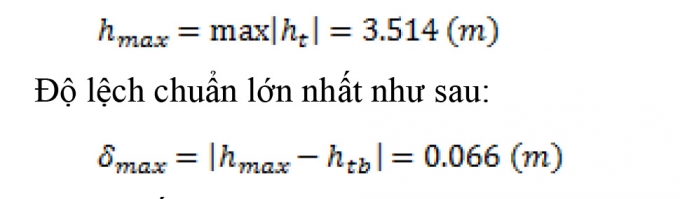 |
(3)
(4)
với sai số xác lập khá nhỏ.
Trong quá trình đo trục cảm biến, máy đo được giả lập độ lệch so với vị trí cân bằng gây ra chuyển vị trục sao cho tâm trục lệch với phương thẳng đứng một góc 80 (phương x), bộ điều khiển sẽ cấp tín hiệu mô-men kéo trục về điểm cân bằng sau 2 giây.
Bước tiếp theo, đặt máy tại nhiều vị trí để tiến hành đo, thu thập và đánh giá dữ liệu thực nghiệm. Kết quả đo tại từng điểm được thể hiện trên Hình 3.2. Quan sát hình vẽ ta thấy sai lệch độ sâu giữa máy đo được thiết kế chế tạo với máy đo chuẩn nằm trong giới hạn cho phép.
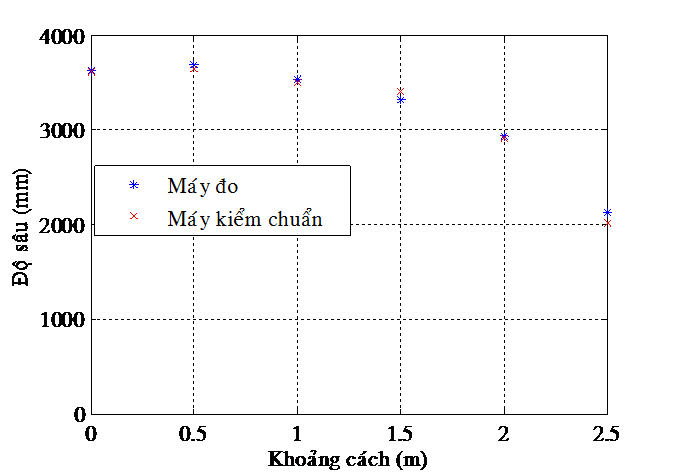 |
| Hình 3.2: Kết quả đo theo khoảng cách so sánh với máy chuẩn |
3.3. Bàn luận
Sau khi thiết lập qui trình đo và thử nghiệm, máy đo cho thấy khả năng hiệu chỉnh được trục cảm biến về vị trí xác lập chỉ trong vòng 2 giây, sai số xác lập phù hợp với yêu cầu thực tế.
So với các thiết bị ngoại nhập khác, máy đo trong đề tài có ưu điểm nổi bật là các máy ngoại nhập chỉ phù hợp với đo tĩnh, không có cơ chế tự điều chỉnh độ nghiêng của cảm biến khi lắp lên tàu di động, trong khi đó máy đo thỏa mãn được điều này.
Sai số phép đo của máy so với thiết bị chuẩn có chênh lệch. Các sai số này cũng bị ảnh hưởng bởi vị trí tiếp xúc của đầu đo trong thiết bị chuẩn tại đáy sông và vị trí mà sóng âm truyền tới và phản hồi. Tuy nhiên, mức chênh lệch nằm trong tầm cho phép.
Ngoài ra, trong quá trình thử nghiệm các thông số về hình dáng, khối lượng của máy phù hợp với yêu cầu thực tế, dễ dàng và cơ động khi lắp máy, phù hợp với đại hình và phương tiện ở Việt Nam.
4. KẾT LUẬN
Sau khi thiết kế và chế tạo máy đo đã đạt được các tiêu chuẩn đề ra, được công nhận đạt tiêu chuẩn bởi một đơn vị kiểm định độc lập [6].
Các tính năng quan trọng như độ chính xác, độ phân giải tương đương như thiết bị ngoại nhập. Tuy nhiên, máy đo đề xuất có ưu điểm nổi bật hơn thiết bị đo ngoại nhập, bởi vì máy ngoại nhập chỉ phù hợp với đo tĩnh, không có cơ chế tự điều chỉnh độ nghiêng của cảm biến khi lắp lên tàu di động, trong khi đó sản phẩm nghiên cứu thỏa mãn được điều này. Ngoài ra, sản phẩm chế tạo còn dễ lắp đặt và sử dụng phù hợp với điều kiện Việt Nam.
Một điều khác không kém phần quan trọng từ kết quả của đề tài, đó là chúng ta từng bước làm chủ được công nghệ chế tạo thiết bị đo sâu trong nước, tiến tới chuyển giao công nghệ cho các cơ sở sản xuất, từ đó chúng ta không phụ thuộc vào công nghệ chế tạo thiết bị từ nước ngoài cũng như giá thành bảo dưỡng sửa chữa, thay đổi thông số của thiết bị ngoại nhập trong quá trình vận hành.
Tài liệu tham khảo
[1]. Chu Xuân Nam (2011), Nghiên cứu, thiết kế chế tạo bộ hiển thị thông số động độ tĩnh không của cầu áp dụng trong bài toán giao thông đường thủy, Báo cáo đề tài nghiên cứu cấp Bộ GTVT.
[2]. Chu Xuân Nam (2012), Nghiên cứu, thiết kế hệ thống giám sát độ tĩnh không cầu sử dụng công nghệ nhúng thời gian thực và mạng GSM/GPRS nhằm đảm bảo an toàn và hạn chế ùn tắc giao thông đường thủy, Báo cáo đề tài nghiên cứu cấp Bộ GTVT.
[3]. Tiếu Văn Kinh (1998), Sổ tay hàng hải, NXB. GTVT.
[4]. Nguyễn Ngọc Lâu, Trương Ngọc Tường, Nguyễn Tân Sơn, Nguyễn Quang (2004), Nâng cao độ chính xác và tính hiệu quả của quá trình thủy đạc bằng kỹ thuật RTK, Hội nghị Khoa học Trắc địa bản đồ và Quản lý đất đai.
[5]. Nguyễn Viết Thành (2008), Chế tạo máy đo sâu hàng hải, Báo cáo đề tài nghiên cứu khoa học cấp Bộ.
[6]. Chu Xuân Nam (2014), Nghiên cứu chế tạo thiết bị đo sâu phục vụ công tác khảo sát, cảnh báo an toàn cho tàu thuyền theo tiến trình nội địa hóa sản phẩm, Báo cáo đề tài nghiên cứu cấp Bộ GTVT.
[7]. Chen-Tung Chen, F. J. Millero (1997), Speed of sound in seawater at high pressures, University of Miami, Florida, USA.
[8]. Huibert-Jan Lekkerkerk (2006), Handbook of Offshore Surveying, Skilltrade BV, Netherland.
[9]. Salous, Sana (2013), Radio Propagation Measurement and Channel Modeling, John Wiley & Sons, p. 424.
[10]. Xu, Guochang (2010), Sciences of Geodesy - I: Advances and Future Directions, Springer Publishing, p. 281.
[11]. Werner Schneider (9 April 2014), Alexander Behm - Der Erfinder des Echolots, Retrieved.
[12]. J. E. Hughes Clarke (April 2006), Applications of Multibeam Water Column Imaging for Hydrographic Survey, The Hydrographic Journal, pp 3-15.
[13]. E. Pouliquen, X Lurton (1992), Sea-Bed Identification Using Echo-Sounder Signal Underwater Acoustics Luxembourg.
[14]. W.J. Capell, C Zaboudinis, K Taluka (1993), Pitch and Yaw Effects on Very Wide Swath Multibeam Sonars, Sea Beam Inst.
[15]. C. De Moustier (1985), Deep Sea Floor Acoustic Backscattering Using Sea Beam, Ph. D thesis, University of California San Diego.
[16]. IMO, Resolution MSC.74(69) (1998), Adoption of new and amended performance standards.
[17]. Odom Hydrographic Systems, Inc. (2008), ECHOTRAC MKII, User manual, USA.
[18]. Jon Rigelsford (1981), Principles of Radar and Sonar Signal Processing, Emerald Group Publishing Limited, Vol. 23, Iss: 2.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.