Liên hệ quảng cáo
Nâng cao chất lượng điều khiển động cơ không đồng bộ rotor lồng sóc trên cơ sở mờ trượt
Bài báo tập trung nghiên cứu thiết kế bộ điều khiển động cơ không đồng bộ rotor lồng sóc theo phương pháp điều khiển mờ trượt trên cơ sở kế thừa mô hình đối tượng động cơ không đồng bộ...
|
TS. Đào Quang Thủy Bộ Khoa học và Công nghệ Người phản biện: TS. Ngô Mạnh Tiến TS. Đinh Anh Tuấn |
Tóm tắt: Bài báo tập trung nghiên cứu thiết kế bộ điều khiển động cơ không đồng bộ rotor lồng sóc theo phương pháp điều khiển mờ trượt trên cơ sở kế thừa mô hình đối tượng động cơ không đồng bộ từ một số công trình đã nghiên cứu trước đó [4]. Qua kết quả mô phỏng sẽ so sánh và nhận định qua các chỉ tiêu kỹ thuật để đánh giá khả năng ưu việt của phương pháp điều khiển mờ trượt so với phương pháp điều khiển PID.
Từ khóa: Động cơ không đồng bộ rotor lồng sóc.
Abstract: Article concentrates in researching design of motor controller asynchronous squirrel-cage rotor using Sliding fuzzy control methods of which results has evaluated by previous researches on model of object asynchronous motor rotor cage [4]. Base on techincal criteria, stimulated results is used to evaluate avantages of Sliding fuzzy control methods in comparision with PID controlling method.
Keywords: Asynchronous motor rotor cage.
1. Đặt vấn đề
Động cơ không đồng bộ ba pha có nhiều ưu điểm như giá thành rẻ, phù hợp với mạng lưới điện của Việt Nam nên được sử dụng rộng rãi trong hệ thống truyền động điện, tuy nhiên vẫn còn có nhược điểm là chất lượng điều khiển của hệ thống vẫn còn bị ảnh hưởng bởi sự thay đổi biến thiên tham số động cơ như mô-men quán tính J, điện trở Rr. Để giải quyết vấn đề này, trong bài báo, tác giả sử dụng bộ điều khiển mờ để điều khiển tốc độ động cơ ĐCKĐB 3 pha nhằm nâng cao chất lượng điều khiển.
Điều khiển mờ là một lĩnh vực điều khiển kỹ thuật mới, có nhiệm vụ chuyển giao nguyên tắc xử lý thông tin điều khiển của hệ sinh học sang hệ kỹ thuật. Điều khiển mờ được phát triển rất mạnh mẽ từ những năm 1990 và đã đem lại nhiều thành tựu bất ngờ trong lĩnh vực điều khiển. Ưu điểm cơ bản của điều khiển mờ so với các phương pháp điều khiển kinh điển là có thể tổng hợp được bộ điều khiển mà không cần biết trước đặc tính của đối tượng một cách chính xác. Điều khiển mờ chỉ cần xử lý thông tin “không chính xác” hay không đầy đủ, những thông tin mà sự chính xác của nó chỉ nhận thấy được giữa các quan hệ của chúng với nhau và cũng chỉ có thể mô tả bằng ngôn ngữ, đã có thể cho ra những quyết định chính xác.
2. Thiết kế bộ điều khiển mờ trượt
Xét mô hình đối tượng động cơ KĐBBP rotor lồng sóc sử dụng bộ điều khiển PID như Hình 2.1, các tham số động cơ và cơ cấu chấp hành được lấy từ các công trình [1], [2], [3], [4], có dạng sơ đồ cấu trúc điều khiển như sau:
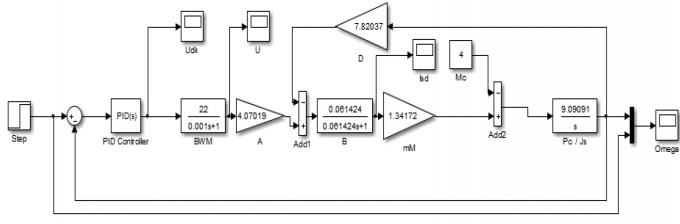 |
| Hình 2.1: Bộ PID số 2 |
2.1. Sơ đồ khối mờ
Bộ mờ cơ bản ta sẽ thiết kế bao gồm ba biến trạng thái mờ đầu vào và một biến mờ đầu ra. Mỗi biến này lại được chia thành nhiều giá trị tập mờ (tập mờ con). Số giá trị mờ trên mỗi biến được chọn để phủ hết các khả năng cần thiết sao cho khả năng điều khiển là lớn nhất trong khi chỉ cần một số tối thiểu các luật điều khiển mờ.
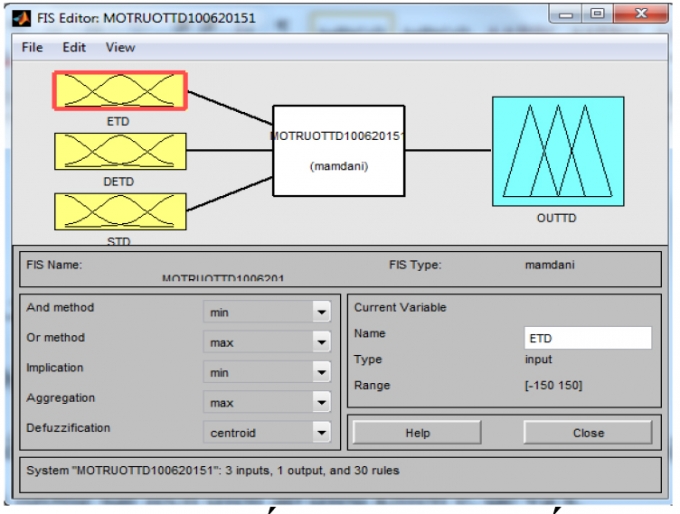 |
| Hình 2.2: Biến vào ra của khối mờ |
2.2. Định nghĩa tập mờ
- Định nghĩa các biến ngôn ngữ vào ra: Biến ngôn ngữ vào là tín hiệu điều khiển của bộ điều khiển mờ cụ thể là lượng sai lệch điện áp điều khiển e, de và s.
Biến ngôn ngữ ra là đại lượng tác động trực tiếp hay gián tiếp lên đối tượng ở đây biến ngôn ngữ ra là điện áp điều khiển U.
- Xác định miền giá trị vật lý của các biến ngôn ngữ vào ra: Miền giá trị vật lý phải bao hàm hết các khả năng giá trị mà biến ngôn ngữ vào ra có thể nhận, ta chọn:
e = [-150; 150] (V)
de = [-500; 500 ] (Vs)
s = [-500; 500]
u = [-17.3; 17.3] (V)
- Số lượng tập mờ: Số lượng tập mờ thường đại diện cho số trạng thái của biến ngôn ngữ vào ra, thường nằm trong khoảng 3 đến 9 giá trị. Nếu số lượng giá trị ít hơn 3 thì không thực hiện được vì việc lấy vi phân, nếu nhiều hơn thì con người khó có khả năng bao quát, vì phải nghiên cứu đầy đủ để đồng thời phân biệt khoảng 5 đến 9 phương án khác nhau và có khả năng lưu trữ trong thời gian ngắn.
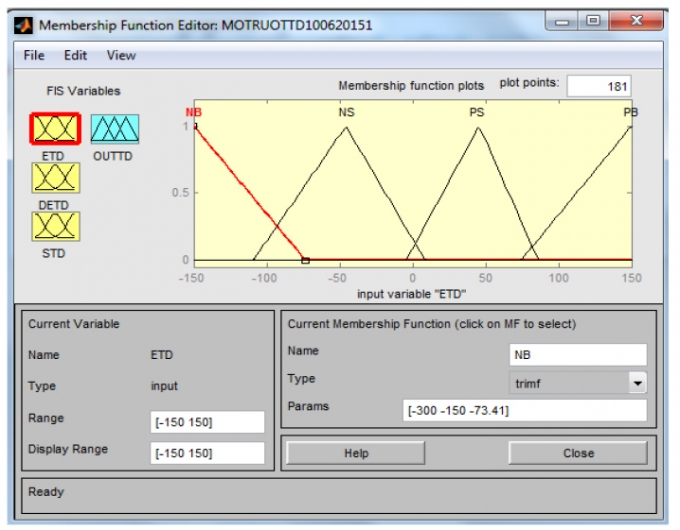
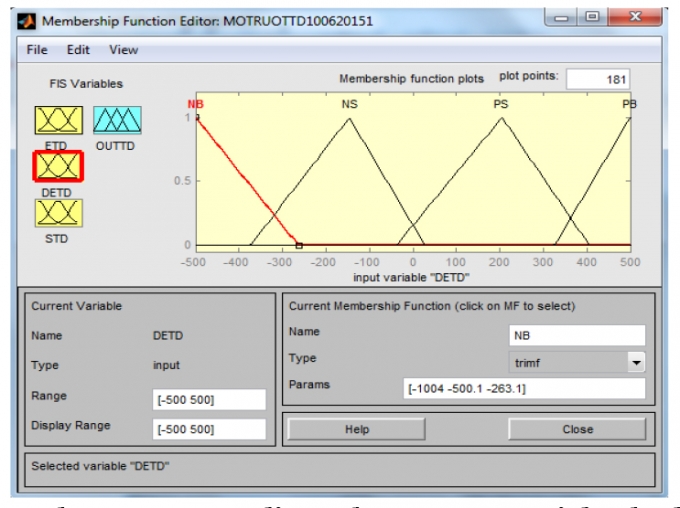
- Xác định dạng hàm liên thuộc: Đây là giai đoạn rất quan trọng vì các quá trình làm việc của bộ điều khiển mờ phụ thuộc rất nhiều vào dáng của hàm liên thuộc. Mặc dù không có một chuẩn mực nào cho việc lựa chọn nhưng thông thường có thể chọn hàm liên thuộc có dạng hình học đơn giản như hình thang, hình tam giác... Các hàm liên thuộc phải có miền phủ lên nhau, đồng thời hợp của các miền liên thuộc phải phủ kín miền giá trị vật lý để trong quá trình điều khiển không xuất hiện các “lỗ trống”. Ta chọn các hàm liên thuộc hình tam giác.
 |
| Hình 2.3: Hàm liên thuộc của sai lệch d |
 |
| Hình 2.4: Hàm liên thuộc của sai lệch e |
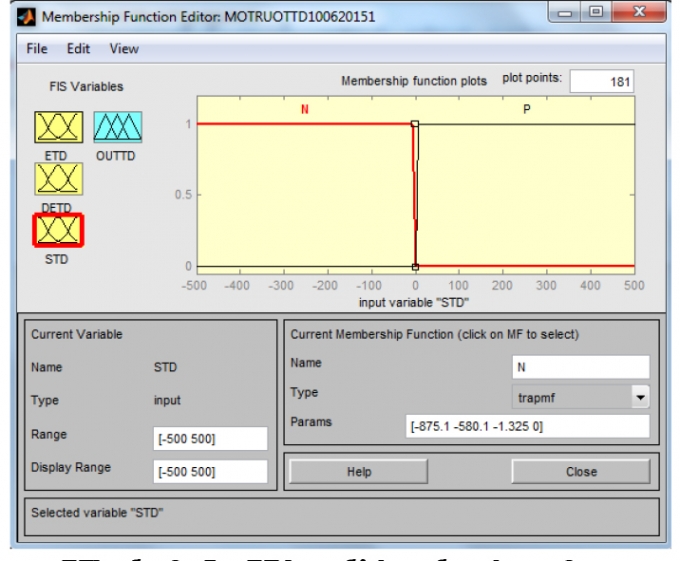 |
| Hình 2.5: Hàm liên thuộc của s |
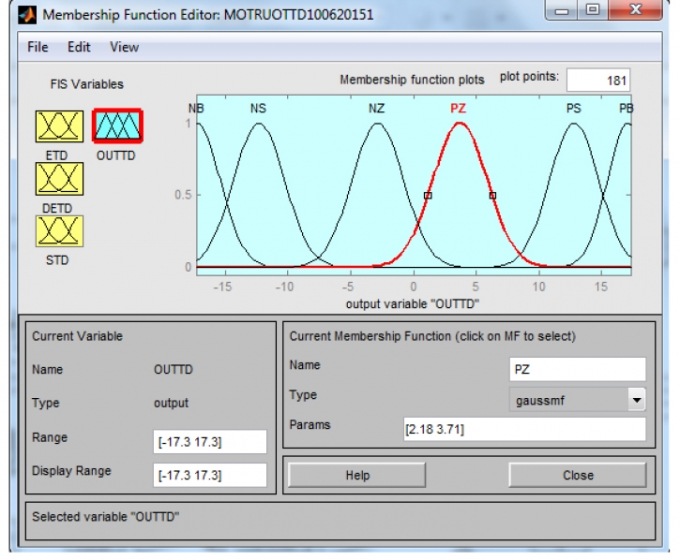 |
| Hình 2.6: Hàm liên thuộc của u |
- Rời rạc hóa tập mờ: Độ phân giải của các dải trị phụ thuộc được chọn trước hoặc là cho các nhóm điều khiển mờ loại dấu phẩy động (các số được biểu diễn dưới dạng dấu phẩy động có độ chính xác đơn) hoặc nguyên ngắn (giá trị phụ thuộc là các số nguyên có độ phụ thuộc là các số có độ dài 2 byte hoặc theo byte). Phương pháp rời rạc hóa sẽ là yếu tố quyết định độ chính xác và tốc độ bộ điều khiển.
2.3. Xây dựng các luật điều khiển
Các luật điều khiển được biểu diễn dưới dạng mệnh đề IF... THEN... Các luật điều khiển này được xây dựng theo 2 nguyên tắc theo Hình 2.7 như sau: Sai lệch càng lớn thì tác động điều khiển càng lớn. Tích phân sai lệch càng lớn thì tác động điều khiển càng lớn.
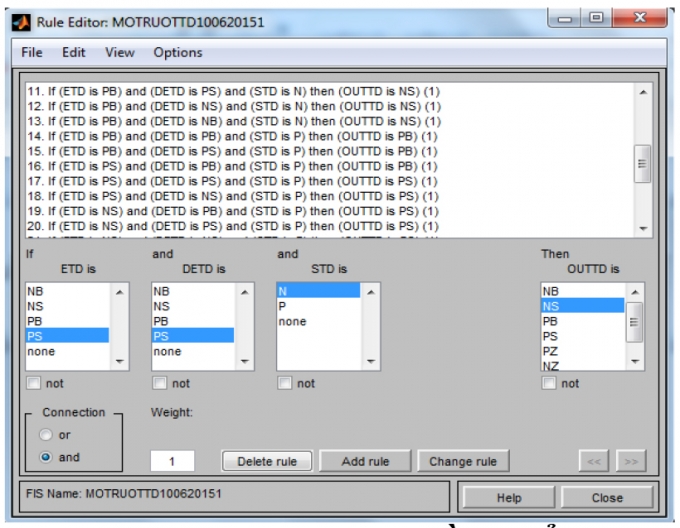 |
| Hình 2.7: Các luật điều khiển |
2.4. Chọn luật hợp thành
Từ tập các luật điều khiển ta có thể dùng các luật hợp thành Max-Min, Max-Prod hay các luật hợp thành khác để tìm hàm liên thuộc hợp thành của tập mờ đầu ra. Ở đây, ta chọn luật hợp thành Max-Min, ta có kết quả như Hình 2.8.
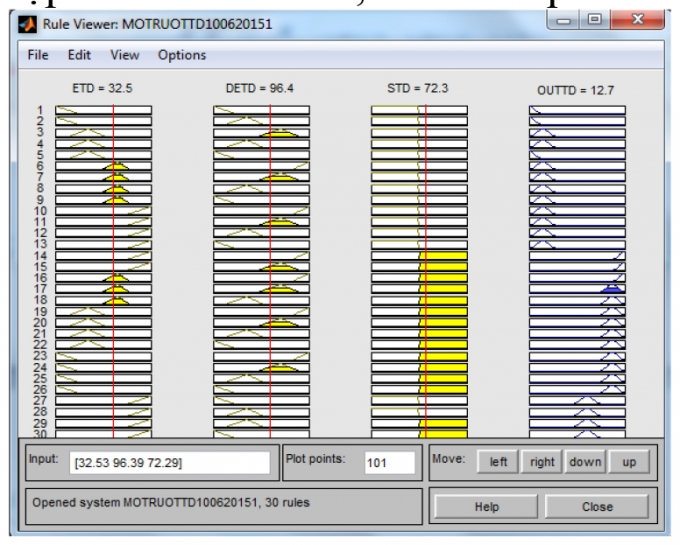 |
| Hình 2.8: Các luật hợp thành dạng hình học |
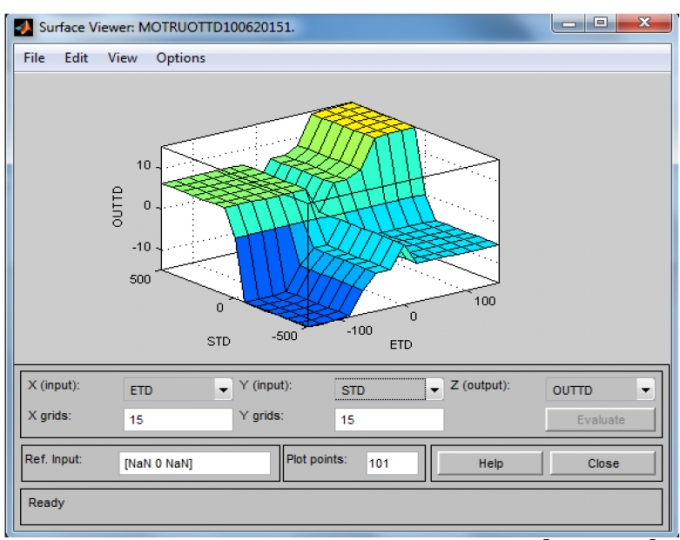 |
| Hình 2.9: Quan hệ vào ra của bộ điều khiển mờ |
2.5. Giải mờ
Từ hàm liên thuộc hợp thành của tập mờ đầu ra, ta có thể dùng phương pháp giải mờ thích hợp để xác định rõ đầu ra của bộ giải mờ. Phương pháp giải mờ được chọn cũng gây ảnh hưởng đến độ phức tạp và trạng thái làm việc của toàn bộ hệ thống. Thường trong thiết kế hệ thống điều khiển mờ, giải mờ bằng phương pháp trọng tâm hay trung bình âm có nhiều ưu điểm hơn cả, vì lúc đó kết quả đầu ra có sự tham gia đầy đủ của tất cả các luật điều khiển. Ở đây, giải mờ bằng phương pháp trọng tâm, ta có kết quả hợp thành và giải mờ như Hình 2.9.
3. Cấu trúc bộ điều khiển mờ trượt
Cấu trúc bộ điều khiển mờ trượt bằng Simulink được mô tả theo Hình 3.1 dưới đây:
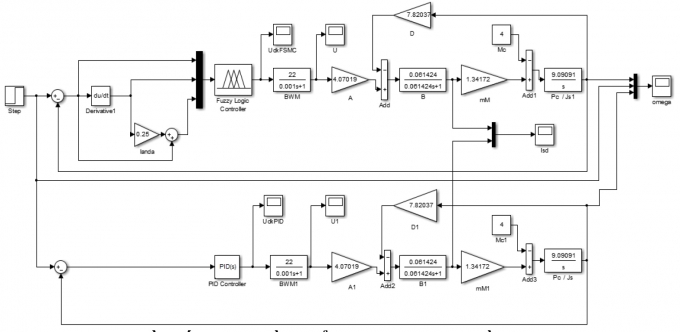 |
| Hình 3.1: Sơ đồ khối của bộ điều khiển mờ trượt và PID bằng Simulink |
Với mô hình và cách thiết lập như trên ta thu được kết quả mô phỏng sau:
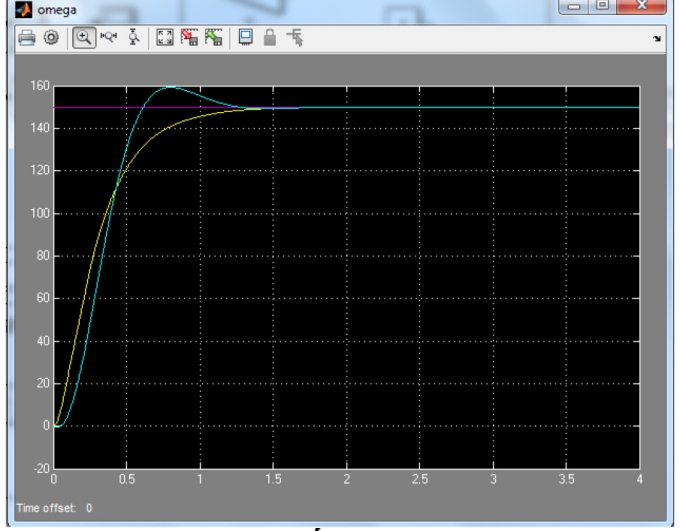 |
| Hình 3.2: Đáp ứng tốc độ động cơ sử dụng bộ điều khiển mờ trượt và PID |
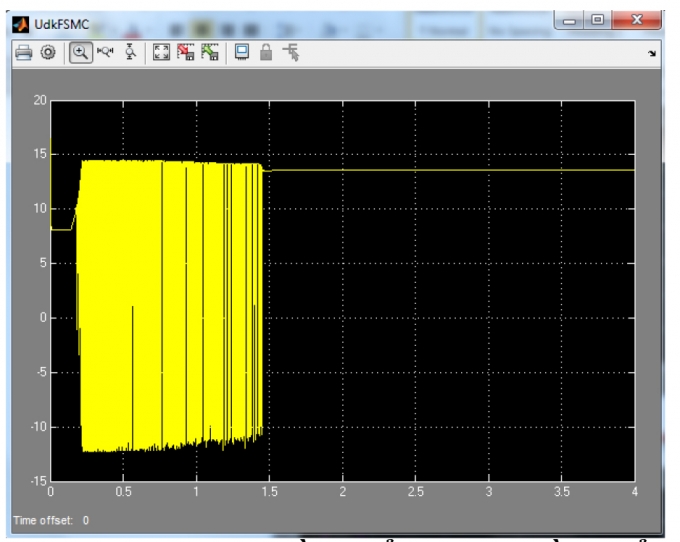 |
| Hình 3.3: Điện áp điều khiển của bộ điều khiển mờ trượt |
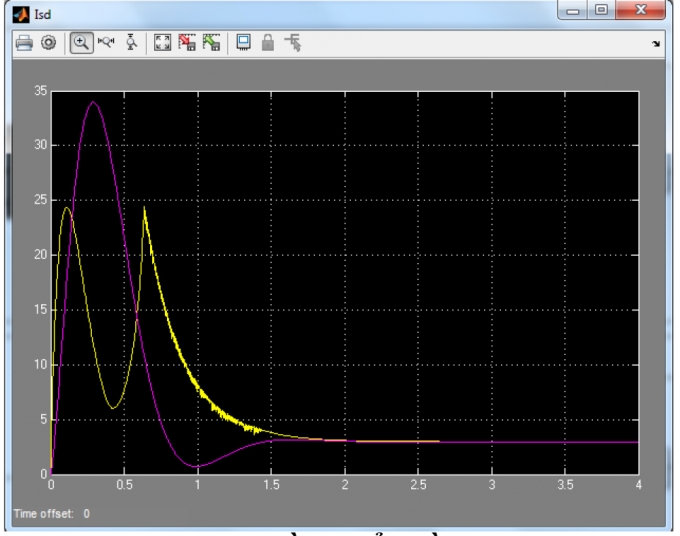 |
| Hình 3.4: Dòng điện Isd điều khiển bằng bộ mờ trượt và PID |
Nhìn vào kết quả mô phỏng Hình 3.2 ta có thể thấy thời gian đáp ứng và ổn định tốc độ của động cơ của bộ điều khiển mờ trượt khi tín hiệu đặt là ω = 150 (rad/s) hay n = 1430 (vòng/phút) là khoảng 1,4s nhanh hơn 0,2s so với bộ điều khiển PID [4], bộ điều khiển mờ trượt không có độ quá điều chỉnh như bộ điều khiển PID và dòng điện Isd = 24A nhỏ hơn 10A so với bộ điều khiển PID (Hình 3.4).
4. Kết luận
Bài báo đã thiết lập được các bước thiết kế bộ điều khiển mờ trượt động cơ không đồng bộ ba pha rotor lồng sóc để từ đó so sánh với đáp ứng của bộ điều khiển PID công trình [4]. Đồng thời, qua đó đánh giá được những ưu điểm của bộ điều khiển mờ trượt so với bộ PID, cụ thể đã đánh giá được chất lượng của bộ điều khiển mờ trượt và so sánh với bộ điều khiển PID, trong quá trình điều khiển động cơ thì dòng điều khiển Isd nhỏ hơn dòng điều khiển dùng bộ điều khiển PID.
Tài liệu tham khảo
[1]. Nguyễn Văn Đạt, Vũ Tư Khoa (2006), Nghiên cứu phương pháp mô tả động cơ không đồng bộ ba pha trên hệ tọa độ tựa theo từ trường rotor, tập IV, số 2, Tạp chí KHKT Nông nghiệp.
[2]. Nguyễn Lê Hoàng (2012), Ứng dụng MATLAB & SIMULINK để mô phỏng động cơ không đồng bộ ba pha theo phương pháp điều khiển vector với bộ điều khiển PID, Tập san Thông tin Khoa học & Giáo dục, số 6, Tạp chí Đại học Đông Á.
[3]. Cù Tuấn Anh (2015), Nâng cao chất lượng điều khiển động cơ không đồng bộ rotor lồng sóc trên cơ sở mờ trượt, Luận văn Thạc sỹ kỹ thuật.
[4]. Đào Quang Thủy (2015), Tính toán và thiết kế bộ điều khiển động cơ không đồng bộ rotor lồng sóc bằng thuật toán PID, Tạp chí GTVT, số tháng 10/2015.
[5]. Phan Xuân Minh, Nguyễn Doãn Phước (2002), Lý thuyết điều khiển mờ, NXB. Khoc học và Kỹ thuật.
[6]. Nguyễn Doãn Phước, Phan Xuân Minh, Hán Thành Trung (2006), Lý thuyết điều khiển phi tuyến, NXB. Khoc học và Kỹ thuật.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.