Liên hệ quảng cáo
Mô phỏng số xâm thực cục bộ trên bánh lái tàu thủy
Bài báo sử dụng phương pháp phần tử biên để tính toán và mô phỏng loại xâm thực cục bộ trên bánh lái tàu thủy, từ đó chỉ ra ảnh hưởng của bánh lái bị xâm thực đến điều khiển hướng chuyển động tàu thủy.
|
PGS. TS. Phạm Kỳ Quang TS. Vũ Văn Duy Trường Đại học Hàng hải Việt Nam ThS. Cổ Tấn Anh Vũ ThS. Nguyễn Thành Nhật Lai Trường Đại học Giao thông vận tải TP. Hồ Chí Minh Người phản biện: TS. Trần Văn Lượng TS. Nguyễn Thanh Sơn |
Tóm tắt: Bài báo sử dụng phương pháp phần tử biên để tính toán và mô phỏng loại xâm thực cục bộ trên bánh lái tàu thủy, từ đó chỉ ra ảnh hưởng của bánh lái bị xâm thực đến điều khiển hướng chuyển động tàu thủy.
Từ khóa: Mô phỏng số xâm thực, bánh lái tàu thủy.
Abstract: The article uses boundary element method to calculate and simulate cavitation area on the ship rudder, therefore gives the influence of cavitation rudder to control the movement direction of ship.
Keywords: Simulation of cavitation, rudderless ship.
1. Đặt vấn đề
Bánh lái là thiết bị nhằm thay đổi hướng chuyển động tàu thủy và đặt ngay sau chân vịt để chuyển năng lượng dòng chảy thành lực bẻ lái. Do profil bánh lái có dạng đối xứng, nên khi ở vị trí α = 00 phân bố áp suất hai bên luôn bằng nhau, nghĩa là không có lực bẻ lái và tàu chuyển động thẳng, khi góc quay bánh lái α ≠ 00 (- 350 ¸ + 350) phân bố áp suất ở hai bên sẽ khác nhau, dẫn đến hình thành lực bẻ lái (Hình 1.1).
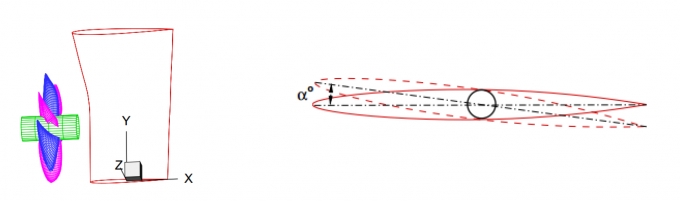 |
| Hình 1.1: Hình ảnh vị trí bánh lái |
Trong quá trình điều khiển tàu thủy, bánh lái bị xâm thực (khi áp suất nhỏ hơn áp suất hơi bão hòa của chất lỏng) ở một số giai đoạn (đặc biệt khi tàu chạy tốc độ cao, khi thay đổi hướng chuyển động, thay đổi chế độ làm việc của máy…) gây ảnh hưởng tới lực bẻ lái. Điển hình nhất là bánh lái bị xâm thực cục bộ, nghĩa là chu kỳ hình thành - phát triển - mất đi diễn ra trong khoảng thời gian rất ngắn, dẫn đến lực bẻ lái bị dao động, tác động trực tiếp đến quá trình điều khiển hướng chuyển động của tàu.
2. Mô hình nghiên cứu và thuật toán
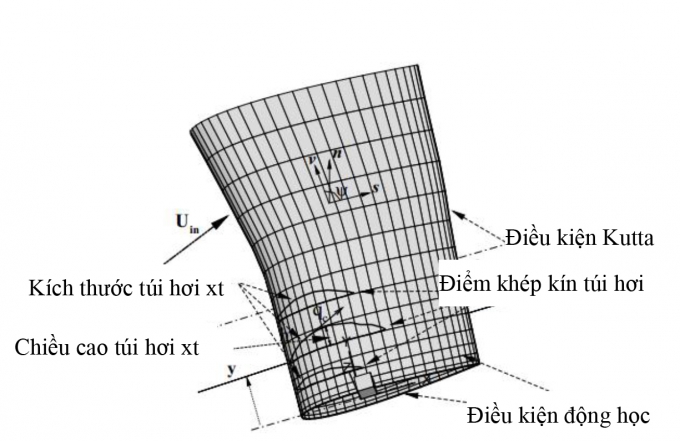
Xâm thực cục bộ có đặc điểm là túi hơi xuất phát từ mép vào của bánh lái và khép kín trên thân (Hình 2.1):
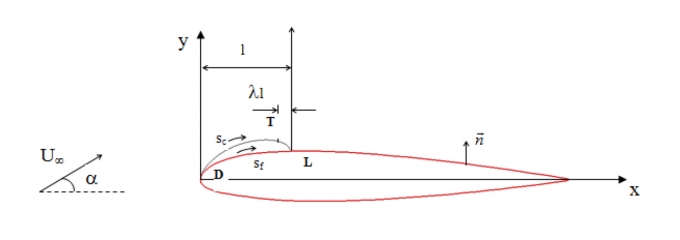 |
| Hình 2.1: Mô hình nghiên cứu [1] |
Trong đó: D - Điểm bắt đầu của túi hơi; L - Điểm khép kín; l - Chiều dài túi hơi; ll - Vùng chuyển đổi, U¥ - Vận tốc dòng tới (tốc độ dòng chảy sau chân vịt). Với tổ hợp (α ; U¥) nhất định nào đó sẽ xuất hiện túi hơi xâm thực cục bộ sc; sf - Miền profil trong vùng xâm thực.
Xuất phát từ mô hình bài toán, các điều kiện trên biên dạng cánh và trong vùng xâm thực sẽ tính toán được kích thước túi hơi theo trình tự sau:
- Chia biên dạng cánh thành N panel với N = Nc + Nw, trong đó: Nc - Số panel trong vùng xâm thực; Nw - Số panel vùng còn lại;
- Chọn p là điểm gốc, theo định lý Green [2], nhận được:
(1)
Trong đó: fp - Thế xáo trộn tại điểm gốc p; r - Khoảng cánh từ p tới bề mặt các phần tử ds dọc theo biên dạng cánh trong vùng xâm thực và không xâm thực; Dfw - Bước nhảy thế ở mép sau cánh.
- Với Sc là chiều dài dây cung vùng xâm thực, khi đó:
 |
(2)
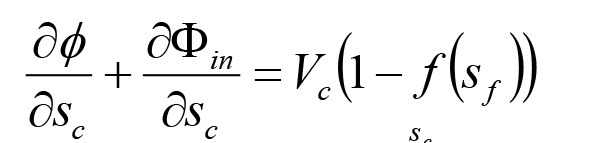
Thế trên vùng xâm thực được xác định như sau:
(3)
Từ đó thực hiện vòng lặp để đảm bảo điều kiện đóng trên cánh, nghĩa là thay đổi chiều dài túi hơi l và độ cao túi hơi h với các số xâm thực cho trước để đạt điều kiện đóng là:
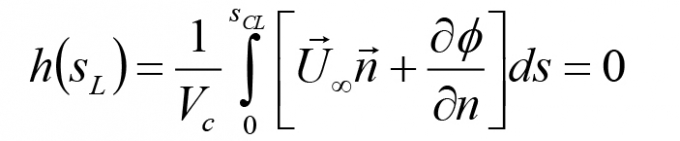 |
(4)
Trong đó: scL - Tổng chiều dài dây cung của bề mặt vùng xâm thực.
Hoặc có thể xác định theo biểu thức sau:
 |
(5)
Với mỗi số xâm thực (hoặc chiều dài vùng xâm thực) cho trước và một góc đặt cánh tương ứng, có thể ấn định thêm vị trí điểm tách thành lD/c, từ đó thực hiện các vòng lặp để xác định điểm đóng L và hình dạng túi hơi theo kỹ thuật sau:
Gọi độ cao túi hơi tại vị trí bất kỳ là d, nó sẽ phụ thuộc vào l và s (chiều dài profil và số xâm thực):
 |
(6)
Thực hiện các vòng lặp sao cho thỏa mãn điều kiện đóng trên biên dạng cánh là: d(l,s) = 0 (Hình 2.2). Ở đây ấn định số xâm thực rồi thực hiện kỹ thuật lặp theo phương pháp “secant” của Newton-Raphson.
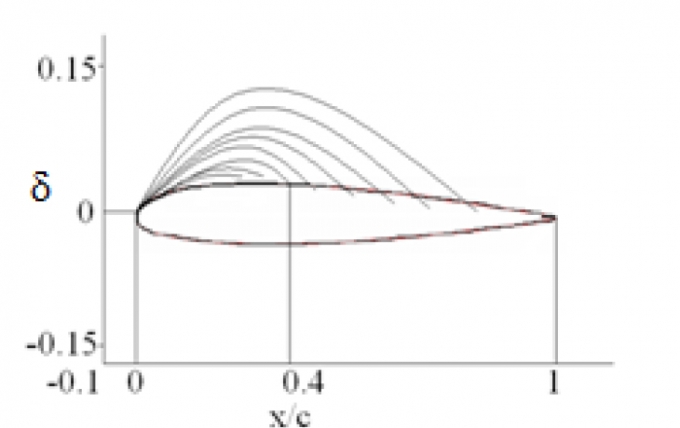 |
| Hình 2.2: Hình ảnh các vòng lặp khi xác định túi hơi xâm thực |
Trên Hình 2.2 nhận xét rằng: Tại vị trí x/c = 0,4 điều kiện lặp đối với túi hơi xâm thực cục bộ được thỏa mãn (điểm xuất phát từ mép vào, điểm khép kín trên profil và áp suất trong vùng túi hơi là áp suất hơi bão hòa của chất lỏng).
Kết quả kích thước túi hơi xâm thực cục bộ ở đây được xác định trên các profil, vậy để tính toán mô phỏng túi hơi của cả bánh lái (bài toán 3D) về mặt lý thuyết có thể tính toán trực tiếp với kích thước thật của bánh lái hoặc sử dụng phần mềm có sẵn, khi đó khối lượng tính toán sẽ rất lớn. Trong nội dung bài báo nhóm tác giả đề xuất việc xác định túi hơi 3D trên cơ sở nhiều bài toán 2D, cụ thể theo Hình 2.3:
 |
| Hình 2.3: Mô hình sâu chuỗi nhiều túi hơi 2D |
Với phương pháp này, xác định kích thước túi hơi trên từng profil, sau đó sâu chuỗi các profil kèm theo túi hơi tương ứng sẽ cho hình dạng túi hơi 3D trên toàn bánh lái. Chương trình được viết bằng ngôn ngữ Fortran.
3. Phân tích kết quả
Kết quả tính toán cho profil NACA16006, được mô tả trên Hình 3.1 và Hình 3.2:
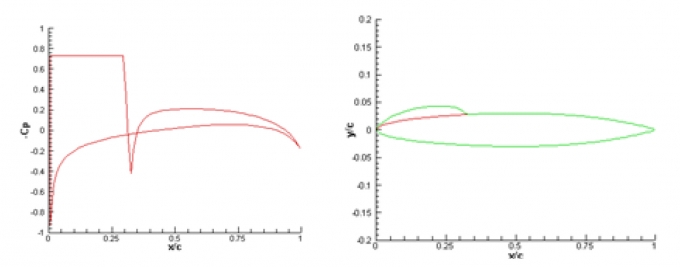 |
| Hình 3.1: Hệ số áp suất và kích thước túi hơi xâm thực tương ứng tại α = 100; U¥=3m/s |
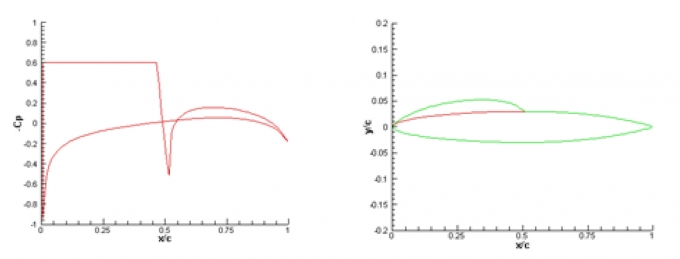 |
| Hình 3.2: Hệ số áp suất và kích thước túi hơi xâm thực tương ứng tại α = 100; U¥= 4m/s |
Qua kết quả tính toán hệ số áp suất Cp và kích thước túi hơi tương ứng, thấy rõ trong vùng profil bị xâm thực có cùng áp suất là áp suất hơi bão hòa, do đó Cp = hằng số.
Ngoài ra, túi hơi xâm thực cục bộ còn có đặc điểm là hình thành - phát triển - mất đi với chu kỳ ngắn (khoảng 45Hz) [3], dẫn tới lực bẻ lái tác động trên bánh lái bị dao động, gây khó khăn cho điều khiển hướng chuyển động của tàu, đây là bài toán cho dòng chảy không dừng, thuật giải khá phức tạp, đòi hỏi khối lượng tính lớn.
4. Kết luận
Bài báo đưa ra được thuật toán trên cơ sở phương pháp phần tử biên để xác định kích thước túi hơi xâm thực cục bộ trên profil cánh, sau đó sâu chuỗi các profil kèm túi hơi xâm thực tương ứng để hình thành túi hơi xâm thực trên toàn bánh lái. Tuy nhiên, để xác định kích thước túi hơi cũng như phân tích những ảnh hưởng của chúng đến đặc tính điều khiển hướng chuyển động của tàu thủy, đòi hỏi cần có thực nghiệm gắn trên một mẫu tàu cụ thể, khi đó nhóm tác giả sẽ công bố trong các bài báo sau.
Tài liệu tham khảo
[1]. Phạm Hồng Giang (2002), Phương pháp phần tử biên, NXB. Khoa học và Kỹ thuật, Hà Nội.
[2]. Padamanabhan Krishnaswamy (2000), Flow modelling for partially cavitating hydrofoils, PhD thesis, Technical university of Denmark.
[3]. Vũ Văn Duy, Nguyễn Thế Mịch, Nguyễn Thế Đức (6-7/12/2007), Mô phỏng vùng xâm thực trong dòng bao quanh profil cánh bằng phương pháp phần tử biên, trang 77 - 84, Tuyển tập Hội Cơ học toàn quốc lần thứ VIII, Hà Nội.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.