Liên hệ quảng cáo
Điều khiển hệ thống tời quấn dây tàu thủy
Hệ thống tời quấn dây tàu thủy ngăn ngừa sự trôi dạt và giữ cố định vị trí tàu trong cầu cảng khi bốc dỡ hàng hóa hoặc cố định vị trí tàu tại vùng neo đậu, đặc biệt đối với cảng biển có mực nước thủy triều lên xuống thất thường.
Hệ thống điều khiển tự động tời quấn dây sẽ điều chỉnh tự động mô men và duy trì tốc độ quấn dây của tời, bám theo tốc độ đặt khi thay đổi tải hoặc thay đổi tốc độ đặt, nhằm mục đích duy trì sức căng trên dây cáp buộc tàu, đảm bảo an toàn cho con tàu, hàng hóa, con người.
Trường Đại học Hằng hải Việt Nam
Người phản biện: PGS. TS. Trần Anh Dũng
PGS. TSKH. Đỗ Đức Lưu
Từ khóa: Hệ thống tàu neo tời, xử lý hàng hóa tàu, sức căng của cáp neo, an toàn.
Abstract: The ship mooring winch system prevents the ship from drifting away from a berth and holds the ship in fixed position when the ship in port for cargo handling or fixed position at the anchorage, especially for seaports tide level fluctuating. The control system automatically regulates torque and maintains winch winding speed, follows the set speed when the load changes or set speed changes, aim to maintain tension of the mooring cables, ensuring the safety of the ship, cargo, people.
Keywords: Ship mooring winch system, ship cargo handling, tension of the mooring cables, safety.
1. Đặt vấn đề
Hệ thống tời quấn dây tàu thủy thực hiện nhiệm vụ chằng buộc và cố định vị trí của tàu bằng dây cáp khi tàu cập cảng, bốc dỡ hàng hóa. Dây cáp buộc tàu luôn phải được duy trì sức căng phù hợp để giữ tàu ở vị trí đã định trước. Nếu sức căng của dây cáp chằng buộc tàu không duy trì ở giá trị phù hợp, cũng như sự thay đổi lượng choán nước khi tàu bốc dỡ hàng hóa, thì sự nguy hiểm cho tàu sẽ gia tăng trong trường hợp tàu đỗ bến tại các cảng biển có mực nước thủy triều thay đổi thất thường, dẫn đến tàu có thể bị dịch chuyển, xô lệch và tác động vào cầu cảng gây ra những hiểm họa khôn lường. Những yếu tố này thường xuyên làm thay đổi sức căng trên dây cáp buộc tàu [1, 2, 4]. Hơn nữa, tàu có thể bị rung, lắc do sóng gió, dòng chảy cũng ảnh hưởng đến sức căng trên dây cáp buộc tàu. Do đó sẽ dẫn đến biên độ di chuyển của tàu thay đổi lớn, có thể làm đứt dây cáp buộc tàu và tạo nên tình huống nguy hiểm, mất an toàn cho con người, hàng hóa, thiết bị và con tàu.
Do vậy, trên các tàu có trọng tải lớn và yêu cầu mức độ an toàn cao như tàu công – ten – nơ, tàu chở ô tô, tàu khách, tàu dầu, phà… thì việc tự động điều chỉnh sức căng trên dây cáp của tời quấn dây là một vấn đề quan trọng và luôn cần phải được duy trì ổn định.
Bài báo đề cập đến vấn đề nghiên cứu hệ thống điều khiển tời quấn dây tàu thủy để điều chỉnh tự động giá trị mô men trên dây cáp và vận tốc của trống tời, nhằm mục đích duy trì sức căng trên dây cáp buộc tàu, tăng tính an toàn và hiệu quả kinh tế trong khai thác vận tải biển. Kết quả nghiên cứu được trình bày trong các phần sau.
2. Mô hình toán của hệ thống tời quấn dây tàu thủy
Hệ thống tời quấn dây tàu thủy bao gồm động cơ, hộp số và tời. Động cơ có thể là động cơ thủy lực, động cơ điện hoặc động cơ diesel. Với mục đích nghiên cứu, động cơ có tính chất tổng quát được sử dụng. Bộ điều khiển PID sử dụng để điều chỉnh vận tốc góc của tời. Theo đó, Hình 2.1 mô tả khái quát chung các thành phần hệ thống.
Hình 2.1: Sơ đồ khối cấu trúc của hệ thống tời quấn dây tàu thủy
2.1. Mô hình động cơ
Một động cơ tổng quát có thể được mô hình hóa như một trục quay được điều khiển bởi một mô men vào và truyền động cho một tải. Phương trình sự chuyển động của trục động cơ [3, 5, 6]
 (1)
(1)
 (2)
(2)
Trong đó: - Vị trí góc của trục động cơ;
![]() - Vận tốc góc của trục động cơ;
- Vận tốc góc của trục động cơ;
![]() - Mô men quán tính của động cơ;
- Mô men quán tính của động cơ;
![]() - Mô men trên trục động cơ;
- Mô men trên trục động cơ;
![]() - Mô men hộp số phía động cơ.
- Mô men hộp số phía động cơ.
2.2. Mô hình hộp số
Một phía của hộp số nối với động cơ, phía còn lại nối với tời, được minh họa như trong Hình 2.2. Vai trò chính của hộp số là để điều chỉnh tốc độ của tải cho phù hợp với tốc độ của động cơ. Việc này được thực hiện bởi một bộ giảm tốc, bộ giảm tốc này cũng nhằm mục đích tạo ra mô men quay lớn hơn. Dưới đây là một hộp số đàn hồi với vùng không nhạy, mối quan hệ giữa mô men và vận tốc góc giữa cửa vào và cửa ra được minh họa như trong Hình 2.2, được mô tả như sau [3, 5, 6]:
 (3)
(3)
 (4)
(4)
Trong đó: ![]() - Vận tốc góc của tời;
- Vận tốc góc của tời;
![]() - Mô men truyền động phía tời;
- Mô men truyền động phía tời;
![]() - Tỷ số truyền của hộp số.
- Tỷ số truyền của hộp số.

Hình 2.2: Hộp số giảm tốc
Hộp số giảm tốc được mô hình hóa như một lò xo và bộ giảm chấn với mô men được xác định như sau:
![]() (5)
(5)
Trong đó: ![]() - Hệ số giảm chấn và
- Hệ số giảm chấn và ![]() - Độ cứng của lò xo.
- Độ cứng của lò xo.
Sự biến dạng đàn hồi của hộp số liên quan đến phía động cơ. Độ lệch truyền động giữa động cơ và tải như sau:
 (6)
(6)
Trong đó: ![]() - Vị trí góc của trục tời.
- Vị trí góc của trục tời.
Mô men truyền động phụ thuộc vào độ lệch truyền động ![]() và được mô tả như sau:
và được mô tả như sau:
 (7)
(7)
Trong đó: ![]() - Vùng không nhạy của hộp số.
- Vùng không nhạy của hộp số.
Sự kết nối giữa hộp số và tời được mô tả bằng mối quan hệ:
 (8)
(8)
2.3. Mô hình tời
Hệ thống tời quấn dây tổng quát có thể được mô hình hóa như một trục quay với quán tính lớn phụ thuộc vào mô men từ sức căng của dây cáp và hộp số [3, 5, 6].
 (9)
(9)
 (10)
(10)
Trong đó: ![]() - Mô men quán tính của trống tời;
- Mô men quán tính của trống tời; ![]() - Định hạn giảm chấn theo chiều dài phụ thuộc chủ yếu vào ma sát và – Mô men của dây cáp trên trống tời.
- Định hạn giảm chấn theo chiều dài phụ thuộc chủ yếu vào ma sát và – Mô men của dây cáp trên trống tời.
Hệ thống tời đặc trưng cho sự chuyển đổi từ chuyển động quay sang chuyển động tịnh tiến, được thể hiện trên Hình 2.3.
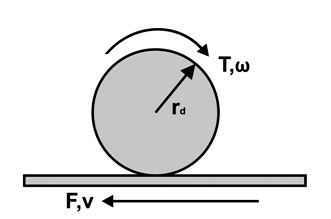
Hình 2.3: Chuyển động quay sang chuyển động tịnh tiến
Chuyển động tịnh tiến tương ứng với sự thu, thả dây cáp trên trống tời. Sự biến đổi này được mô tả bởi:
 (11)
(11)
 (12)
(12)
Trong đó:
H – Lực tác dụng lên đường dây theo phương nằm ngang;
![]() - Bán kính trống tời;
- Bán kính trống tời;
![]() - Vận tốc dài của dây cáp.
- Vận tốc dài của dây cáp.
3. Mô phỏng hệ thống tời quấn dây
Vận tốc góc của tời quấn dây được điều khiển bởi bộ điều khiển PID có dạng:
![]() (13)
(13)
Trong đó: ![]() - Vận tốc góc mong muốn của tời và
- Vận tốc góc mong muốn của tời và ![]() – Mô men của động cơ.
– Mô men của động cơ.
Trong thực tế, điểm đặt tốc độ tời được lấy như vận tốc dài ![]() , là độ dài cáp trên một đơn vị thời gian trong quá trình thu, thả (mét/phút).
, là độ dài cáp trên một đơn vị thời gian trong quá trình thu, thả (mét/phút).
Hệ thống tời và thông số của bộ điều khiển được chọn để tạo ra một trạng thái ổn định với tốc độ kéo dây cáp của tời là 0 – 35 (m/p).
Các thông số mô hình hóa cho động cơ, hộp số, tời và bộ điều khiển như sau:
Mô men quán tính của động cơ ![]() = 5000; tỷ số truyền của hộp số
= 5000; tỷ số truyền của hộp số ![]() = 8; độ cứng của lò xo hộp số
= 8; độ cứng của lò xo hộp số ![]() = 8; hệ số giảm chấn của hộp số
= 8; hệ số giảm chấn của hộp số ![]() = 2000; vùng không nhạy của hộp số
= 2000; vùng không nhạy của hộp số ![]() = 0.25; mô men quán tính của trống tời
= 0.25; mô men quán tính của trống tời ![]() = 2000; định hạn giảm chấn theo chiều dài của tời
= 2000; định hạn giảm chấn theo chiều dài của tời ![]() = 2000; bán kính trống tời
= 2000; bán kính trống tời ![]() = 0.95; hệ số tỷ lệ của bộ điều khiển;
= 0.95; hệ số tỷ lệ của bộ điều khiển; ![]() hệ số vi phân của bộ điều khiển;
hệ số vi phân của bộ điều khiển; ![]() hệ số tích phân của bộ điều khiển;
hệ số tích phân của bộ điều khiển; ![]() hệ thống được mô phỏng với hai tải khác nhau với giá trị mô men trên dây cáp của trống tời là
hệ thống được mô phỏng với hai tải khác nhau với giá trị mô men trên dây cáp của trống tời là ![]() ,
, ![]() và vận tốc đặt lớn nhất của tời là 35(m/p), được thay đổi giá trị theo quy luật định trước với chiều quay theo hai chiều thu, thả dây cáp buộc tàu. Kết quả được đưa ra như trên Hình 3.1.
và vận tốc đặt lớn nhất của tời là 35(m/p), được thay đổi giá trị theo quy luật định trước với chiều quay theo hai chiều thu, thả dây cáp buộc tàu. Kết quả được đưa ra như trên Hình 3.1.

Hình 3.1: Đặc tính vận tốc thực của tời (màu xanh) và vận tốc đặt (màu đỏ) với hai tải khác nhau
Vận tốc thực của tời quấn dây bám theo giá trị đặt, nhưng có một khoảng thời gian ngắn dao động với một trạng thái tắt dần sau khi thay đổi điểm đặt. Với hai giá trị tải khác nhau thì vận tốc của tời quấn dây vẫn duy trì tốt và ổn định.
4. Kết luận
Hệ thống điều khiển tời quấn dây tàu thủy đã đề xuất, đáp ứng tốt các yêu cầu kỹ thuật, vận tốc thực của tời quấn dây bám theo giá trị vận tốc đặt với số lần dao động nhỏ, độ quá điều chỉnh nằm trong giới hạn cho phép, thời gian điều chỉnh nhỏ phù hợp với chỉ tiêu chất lượng của hệ thống điều khiển tời quấn dây tàu thủy o
Tài liệu tham khảo
[1]. Lưu Đình Hiếu (2004), Truyền động điện tàu thủy, NXB. Xây dựng.
[2]. Hoàng Đức Tuấn, Tô Văn Hưng (8/2014), Hệ thống tự động điều chỉnh sức căng tời quấn dây tàu thuỷ ghép nối điều khiển và giám sát trên máy tính, Tạp chí Khoa học – Công nghệ Hàng hải, số 39 Tr 39 – 42.
[3]. Ole Morten Aamo and Thor Inge Fossen (2000 ), Finite Element Modelling of Mooring Lines, Mathematics and Computers in Simulations, 53:415422.
[4]. T.I. Fossen(2002), Marine Control Sy stems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles, Marine Cybernetics.
[5]. T.I. Fossen (2009), Modelling and Control of Marine Vessels, Norwegian University of Science and Technology.
[6]. O. Egeland and J.T. Gravdahl (2002), Modeling and Simulation for Automatic Control, Marine Cybernetics.
Tag:




Bình luận
Thông báo
Bạn đã gửi thành công.