Liên hệ quảng cáo
Phương pháp định tuyến cho robot tự hành trong địa hình không bằng phẳng
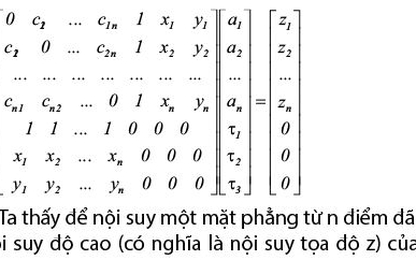
Nghiên cứu phương pháp nội suy mặt phẳng địa hình từ một tập hợp điểm theo phương pháp spline.
Ứng dụng



Liên hệ quảng cáo
Nghiên cứu phương pháp nội suy mặt phẳng địa hình từ một tập hợp điểm theo phương pháp spline.
Ứng dụng